Материал: Механика (статика). учебное пособие. Рябцев В.А
Итак, для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы сумма проекций всех сил на каждую из двух координатных осей в плоскости этих сил равнялась нулю, и чтобы сумма моментов всех сил относительно любой точки, расположенной в плоскости этих сил, также равнялась нулю.
Следует отметить, что вместо уравнений равновесия (8.8) для плоской системы сил можно использовать уравнения
|
|
|
X k 0; |
M O1( Pk ) 0 |
M O2 ( Pk ) 0 , (8.9) |
при условии, что ось х - не перпендикулярна отрезку O1O2;
|
|
|
M O1( Pk ) 0, |
M O2 ( Pk ) 0, |
M O3 ( Pk ) 0 , (8.10) |
при условии, что точки O1, O2, O3 не лежат на одной прямой.
При решении задач можно пользоваться тремя видами систем уравнений равновесия (8.8), (8.9), (8.10) исходя из конкретных условий задач. Выбор вида системы уравнений равновесия зависит в первую очередь от особенностей задачи, уровня знаний, опыта, желания и вкуса решающего.
Использование уравнений равновесия в виде (8.9) и (8.10) иногда позволяет существенно упростить решение задачи.
Известно, что момент силы, отличной от нуля, относительно данной точки равен нулю, когда линия действия силы проходит через данную точку. Отсюда следует практически важный вывод: если при определении неизвестных сил нужно составить уравнения, в которые входят моменты этих сил, то за центр моментов О выгодно брать точку, через которую проходят линии действия неизвестных сил. Подобный подход позволяет иногда получить вместо системы уравнений равновесия совокупность уравнений, каждое из которых содержит только одну неизвестную величину и избежать решения системы уравнений равновесия. Это обстоятельство очень важно
146
для уменьшения влияния отдельных ошибок вычислений на все решение.
8.2.5.Система параллельных сил, расположенных
водной плоскости.
Если все параллельные силы лежат в плоскости х, у, то, выбирая оси так, чтобы ось Ox была перпендикулярна силам,
получим, что все Xk = 0, a Yk = Pk, где Pk – проекция силы на
ось у силы Pk . Из системы (8.8) остаются два уравнения
|
|
|
Pk 0; |
M0 ( Pk ) 0 . |
(8.11) |
Итак, для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы были равны нулю сумма проекций всех сил на ось, параллельную силам, и сумма величин моментов всех сил относительно любой точки, расположенной в плоскости этих сил.
Для плоской системы параллельных сил вместо уравнений (8.11) можно записать
|
|
|
M01( Pk ) 0; |
M02( Pk ) 0 , |
(8.12) |
при условии, что отрезок O1O2 не параллелен силам.
Эта система получится из (8.9), если ось Ox направить перпендикулярно силам.
Для плоской системы сходящихся сил докажем две теоремы, позволяющие пользоваться еще двумя видами систем уравнений вместо системы уравнений (8.6).
Теорема 8.3. Для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы выполнялись условия
|
|
|
X k 0; |
M0 ( Pk ) 0 , |
(8.13) |
где ось Ox не перпендикулярна ОС (С - точка схождения сил).
147
Доказательство необходимости. Пусть плоская система сходящихся сил находится в равновесии. Надо доказать, что выполняются условия (8.13). Ранее доказаны необходимые и достаточные условия (8.6). Первое уравнение (8.13) совпадает с первым уравнением (8.6). Кроме того, при равновесии сил
равнодействующая R = 0, поскольку система сходящихся сил всегда эквивалентна одной силе - равнодействующей. По тео-
|
|
реме Вариньона (§ 7.6), M 0 ( R ) |
M0 ( Pk ) . Момент силы, |
|
|
модуль которой равен нулю, равен нулю: |
M0 ( R ) Rh 0 . |
|
|
Поэтому M 0 ( Pk ) 0 . Получено второе уравнение (8.13).
Таким образом, при доказательстве необходимого условия не пришлось воспользоваться требованием о том, чтобы ось Ox не была перпендикулярна ОС.
Доказательство достаточности. Даны условия (8.13). Нужно доказать, что система сил находится в равновесии.
|
|
Предположим противное, что равно- |
|
|
|
весия нет и поэтому равнодейст- |
|
|
|
|
|
|
|
вующая R |
0 . Тогда, согласно (8.13) |
|
|
|
|
|
|
M 0 ( R ) |
M0 ( Pk ) 0 . Если рав- |
|
|
нодействующая не равна нулю, но ее |
|
|
|
момент равен нулю, то линия дейст- |
|
|
|
|
|
|
|
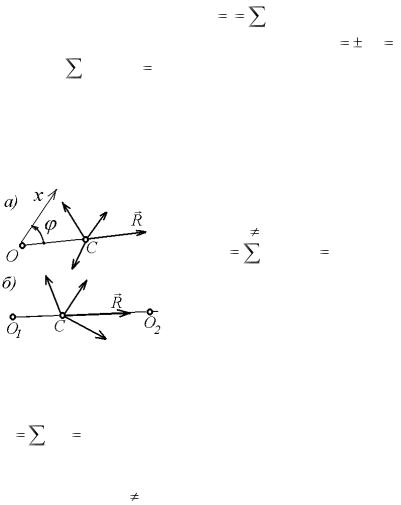
вия R проходит через точку О, (см. |
|
|
|
|
|
|
|
(7.23)). Однако R имеет начало в |
|
|
Рис. 8.5 |
точке схождения сил (рис. 8.5, а). Та- |
|
|
|
ким образом, прямая ОС и линия |
|
|
|
|
|
действия R совпадают. Согласно теореме о проекции вектор- |
|||
ной суммы (7.10) с учетом первого уравнения (8.13), |
|||
R |
X k 0 . Если сила не равна нулю, а ее проекция на ось |
||
Ox равна нулю, то сила перпендикулярна оси Ox. Тогда ось Ox перпендикулярна ОС, что противоречит условию (8.13), согласно которому  90° (см. рис. 8.5, а). Полученное противо-
90° (см. рис. 8.5, а). Полученное противо-
148
речие доказывает теорему, т. е. ошибочность предположения
R 0 . Поэтому R = 0 и система сил находится в равновесии.
Теорема 8.4. Для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы выполнялись условия
|
|
|
MO1( Pk ) 0; |
MO2 ( Pk ) 0 , |
(8.14) |
где прямая O1O2 не проходит через точку С схождения сил.
Доказательство необходимости. Пусть плоская система сходящихся сил находится в равновесии. Надо доказать, что выполняются условия (8.14). Однако, условия (8.13) уже доказаны, а уравнения (8.14) совпадают по виду со вторым уравнением (8.13). Следовательно, при доказательстве необходимости не понадобилось ограничивающее условие, требующее чтобы прямая O1O2 не проходила через точку С схождения сил.
Доказательство достаточности. Даны условия (8.14). Надо доказать, что плоская система сходящихся сил находится в
|
|
|
|
равновесии. Предположим противное, что R |
0 . Тогда, со- |
||
гласно теореме Вариньона и (8.14), получаем |
|
||
|
|
|
|
MO1( R ) |
MO1( Pk ) 0 , MO2 ( R ) |
MO2 ( Pk ) 0 . |
|
Следовательно, точки O1 и O2 лежат на линии действия |
|||
|
|
|
|
равнодействующей R , но, как известно, R проходит через |
|||
точку С схождения сил, т. е. три точки O1, O2 |
и С лежат на од- |
||
ной прямой (рис. 8.5, 6), что противоречит (8.14). Следова- |
|||
|
|
|
|
тельно, предположение о том, что R |
0 было неверным, и R = |
||
0, т. е. система находится в равновесии. Теорема доказана.
Следует обратить внимание на то, что для каждой системы сил число уравнений равновесия строго определено, хотя системы этих уравнений могут иметь различный вид. Например, для произвольной плоской системы сил имеем три урав-
149
нения равновесия, объединенных в системы одного из видов; (8.8), (8.9) или (8.10). Поэтому в задачах, рассматривающих равновесие одного тела под действием системы сил, произвольно расположенных в плоскости, не должно быть больше трех неизвестных величин, иначе задача не может быть решена методами статики абсолютно твердого тела. Такие задачи называются статически неопределимыми. Для плоской системы параллельных сил имеем два уравнения равновесия в виде системы (8.11) или (8.12). Для плоской системы сходящихся сил также имеем два уравнения равновесия в виде систем (8.6), (8.13), (8.14). Таким образом, при решении задач для плоской системы параллельных или сходящихся сил число неизвестных величин не должно быть больше двух. Если число неизвестных величин больше числа уравнений равновесия, то такие задачи рассматривают в сопротивлении материалов.
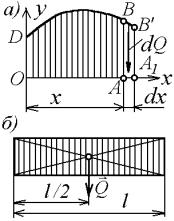
§ 8.3. Распределенная нагрузка
По способу приложения к телу нагрузки делятся на сосредоточенные и распределенные. Выше предполагалось, что нагрузки приложены к телу в точках тела, то есть нагрузки считались сосредоточенными. Сосредоточенная сила - абстракция, так как всякая реальная нагрузка приложена к какому-то участку линии, площади или объему, то есть в бесконечном количестве точек тела. Например, даже сила, передаваемая по нити, распределена по площади поперечного сечения нити. Однако, во многих
случаях, схематизируя (идеализируя) явление, можно считать нагрузку сосредоточенной. Так можно поступать при малости
150