Материал: Механика (статика). учебное пособие. Рябцев В.А

то все векторы моменты сил будут расположены на одной прямой, проходящей через точку О, и перпендикулярной к плоскости сил. Тогда, согласно (7.9), векторное суммирование моментов можно заменить алгебраическим суммированием. Получаем частный случай доказанной теоремы.
Вектор момент равнодействующей плоской системы сходящихся сил относительно произвольной точки в плоскости расположения сил равен алгебраической сумме моментов всех составляющих сил относительно той же точки
|
|
|
M0 ( R ) |
M0 ( Pk ) . |
(7.28) |
Теорема 7.4. Величина момента равнодействующей системы сходящихся сил относительно некоторой оси равна сумме величин моментов всех составляющих сил относительно той же оси.
Доказательство. Спроецируем равенство (7.30) на произвольную ось l, проходящую через точку О и при этом воспользуемся двумя теоремами: о проекции векторной суммы на ось, см. (7.7), и о связи между величинами моментов силы относительно оси и вектором моментом силы относительно какой - либо точки на этой оси, см. (7.25),
|
|
|
|
|
прl M 0 |
( R ) |
прl M 0 |
( Pk |
) . |
Тогда, |
|
|
|
|
|
|
|||
M01( R ) |
M01( Pk ) . |
(7.29) |
||
Теорема доказана.
Рассмотренные теоремы верны и для произвольной системы сил. Доказательство применимости теоремы Вариньона к произвольной системе сил рассмотрено в гл 9.
131
§ 7.7. Задачи для самостоятельного решения
7.1.Как соотносятся между собой модули векторов сил
иP2 , если угол между ними равен 135 , а модуль равно-P
|
действующей этих сил равен модулю мень- |
|||||
|
шей силы? |
|
|
|||
|
|
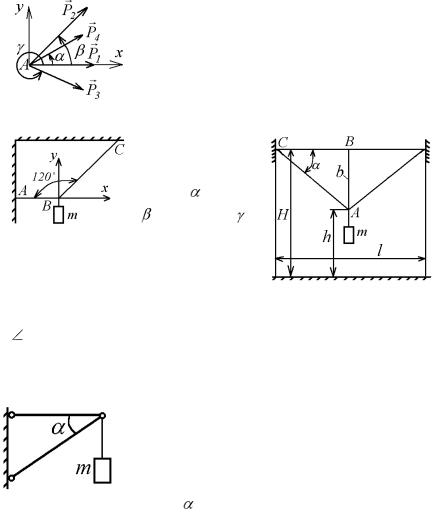
7.2. Определить модуль и направление |
||||
|
равнодействующей |
плоской системы сил |
||||
|
|
|
|
|
|
|
Рис. 7.21 |
P1 , |
P2 , |
P3 |
и P4 (рис. 7.21), приложенных в |
||
точке А, если P1 = P4 = 100 Н, P2 = 120 Н, |
||||||
|
||||||
|
P3 = 80 Н и если |
|
||||
|
известны |
|
углы |
|
||
|
между этими си- |
|
||||
|
лами |
|
= |
30 , |
|
|
|
= |
45 , |
= |
|
||
Рис. 7.22 |
330 . |
|
|
|
||
|
|
7.3. |
|
|||
|
|
|
|
|||
делить силы натяжения тросов АВ и |
|
|||||
СВ (рис. 7.22), на которых висит |
Рис. 7.23 |
|||||
груз массой m = 10 |
кг, |
если |
|
|||
АВС= 120 . Веса тросов не учитывать.
7.4. Фонарь массой m = 17 кг подвешен к середине троса длиной l  20 м (рис. 7.23). Трос провисает на h = 0,5 м. делить силу натяжения троса. Как изменится сила натяжения
20 м (рис. 7.23). Трос провисает на h = 0,5 м. делить силу натяжения троса. Как изменится сила натяжения
|
троса, если стрела провеса была бы вдвое |
|
|
меньше? |
|
|
7.5. |
На прямоугольном кронштейне |
|
(рис. 7.24) висит груз массой m = 2 кг. Сила, |
|
|
сжимающая стержень АВ равна 25 Н. Каков |
|
Рис. 7.24 |
угол |
? |
|
|
|
132
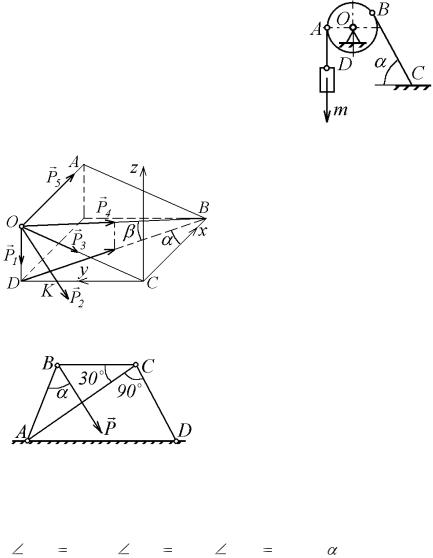
7.6. Веревка DABC, перекинутая через блок, закреплена одним концом С неподвижно (рис. 7.25).
Ко второму концу D этой веревки подвешен груз массой m . Найти силу давления, передаваемую через блок на ось блока и угол, который эта сила образует с горизонталью. Угол  между веревкой ВС и горизонталью известен.
между веревкой ВС и горизонталью известен.
|
|
|
|
7.7. |
|
Рис. 7.25 |
||
|
|
|
|
|
|
|
|
|
|
|
К вершине О прямой треуголь- |
||||||
|
|
ной призмы (рис. 7.26) |
прило- |
|||||
|
|
|
|
|
|
|
|
|
|
|
жены |
пять |
сил P1 , |
P2 |
,…. P5 . |
||
|
|
|
|
|
|
|
|
|
|
|
Сила |
P4 направлена по диаго- |
|||||
|
|
|
|
|
|
|
|
|
|
|
нали ОВ грани ОАВС, |
силы P1 , |
|||||
|
|
|
|
|
|
|
|
|
|
|
P2 , |
P5 - по ребрам ОD, ОС, ОА, |
|||||
|
|
|
|
|
|
|
|
|
|
Рис. 7.26 |
а сила P2 |
лежит в плоскости |
|||||
|
|
грани ОDC и составляет с |
||||||
|
|
ребром OD угол 30 . Определить |
||||||
|
|
модуль и направление равнодей- |
||||||
|
|
ствующей системы сил, |
если P1 = |
|||||
|
|
P3 = 100 Н. |
|
|
|
|
||
|
|
7.8. К узлу В шарнирно- |
||||||
|
Рис. 7.27 |
стержневого |
четырехугольника |
|||||
|
ABCD (рис. 7.27), сторона AD ко- |
|||||||
|
|
|
|
|
|
|
|
|
торого закреплена неподвижно, приложена сила P . Найти си- |
||||||||
лы, |
передающиеся на |
стержни АС и DС, |
если P = |
2 кН, |
||||
ABC 120 , BCA |
30 , ACD |
90 , |
и |
=60 . |
|
|
||
|
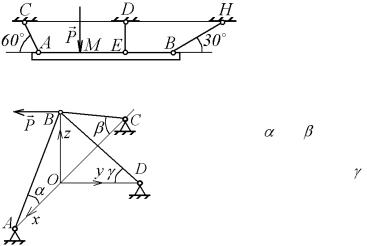
7.9. К горизонтальной балке АВ, подвешенной на трех |
|||||||
канатах АС, ED и ВН, составляющих с прямой АВ угла 120 , |
||||||||
90 |
и 30 (рис. 7.28), в точке М приложена вертикальная сила |
|||||||
|
|
133 |
|
|
|
|
|
|
|
|
|
|
|
|
|
P , равная 0,8 кН. Определить силы, растягивающие канаты, |
||||||
|
если АМ= МЕ= ЕВ= 1 м. |
|||||
|
|
7.10. Три невесомых |
||||
|
стержня соединены меж- |
|||||
|
ду |
собой |
в |
точке |
В |
|
Рис. 7.28 |
(рис.7.29). Стержни АВ и |
|||||
|
ВС лежат в координатной |
|||||
плоскости zОx и их оси составляют с |
||||||
осью х углы |
и |
, |
а стержень BD |
|||
расположен в плоскости zOy и его ось |
||||||
составляет с осью Оу угол |
. К узлу В |
|||||
|
|
|
|
|
|
|
приложена сила P |
параллельная оси |
|||||
|
|
|
|
|
|
|
у. |
Определить |
силы N1 , |
N2 и |
N 3 , |
||
действующие на стержни. Какие из
этих стержней сжаты, а какие – растяРис. 7.29 нуты.
134

Глава 8. УСЛОВИЯ РАВНОВЕСИЯ АБСОЛЮТНО
ТВЕРДОГО ТЕЛА
§ 8.1. Приведение произвольной пространственной системы сил к двум силам
Для сил системы, состоящей из n сил, введем обозначе-
ние P1 ,P2 , ,Pn . Силу с порядковым номером k обозначим
символом Pk .
Главным вектором произвольной системы сил называют вектор, равный векторной сумме всех сил системы
V0 |
Pk . |
(8.1) |
Индекс О означает, что главный вектор приложен к точке
О.
Главным моментом произвольной системы сил относительно данной точки О называют сумму векторов моментов всех сил системы относительно этой точки
M0 M0 ( Pk ) |
(8.2) |
Воздействие сил на тело является объективным процессом. В результате непротиворечивых операций с силами, как с векторами, можно получить из данной системы сил несколько других систем сил. Преобразование одной системы сил в другую является субъективным процессом, поскольку отражает принятие решений какие операции и с какими векторами производить. Однако, изменение описания какого либо процесса не может изменить результат, достигаемый процессом. Поэтому такие преобразования систем сил не могут изменить воздействия на тело, то есть исходная система сил и системы сил, полученные в результате преобразований, будет действовать на тело одинаково.
135