Материал: Механика материалов. Методы и средства экспериментальных исследований
Рис. 3.6. Схема испытательной системы сAVE
настраиваются в ходе пусконаладки и не требуют последующей настройки. Вертикальное положение каретки камеры может быть изменено для корректировки полей зрения и конфигураций нагрузочной цепи.
Калибровка выполняется при помощи специализированного программного обеспечения. Перед проведением тестирования производятся проверки допустимости уровня освещения образца и достаточной контрастности меток на фоне образца.
Для двумерной калибровки изображения используется один высокоточный двумерный калибровочный образец. Для других полей зрения камеры калибровка повторяется при других положениях траверсы, после чего программный алгоритм объединяет данные калибровок.
91
Перед началом тестирования программа обнаружения меток устанавливает изображения, совместимые с образами, имеющимися в библиотеке используемых меток. Затем они отмечаются на активном дисплее красными прямоугольниками. Программа определяет положение идентифицированных меток и использует их координаты в качестве координат центров областей рассмотрения.
Тестирование производится с использованием программного обеспечения Bluehill. После начала тестирования обрабатываются только пиксели, находящиеся в непосредственной близости от меток. Изменения длины измерительной базы между метками отслеживаются с частотой съемки камеры. Величина деформации вычисляется по точным значениям исходной и текущей длины измерительной базы и может быть получена непосредственно в виде цифровых данных.
Перед настройкой видеоэкстензометра необходимо знать величину вероятного изменения размера образца, чтобы можно было выбрать подходящие компоненты. Например, при проведении опыта на одноосное растяжение на этом этапе следует учесть, что все образцы растягиваются за пределы, ограниченные метками измерительной базы, причем нижняя отметка в ходе тестирования смещается вверх. При работе с эластомерными образцами такое растяжение может быть значительным, поэтому необходимо установить поле зрения, значительно превышающее размеры измерительной базы.
Для успешного использования AVE необходимо провести настройку видеоэкстензометра в программном обеспечении Bluehill. Настройка включает в себя следующие процедуры:
– запуск Bluehill и дополнительного программного обеспечения AVE, выбор режима измерения (осевое и/или поперечное измерение) (рис. 3.7);
92
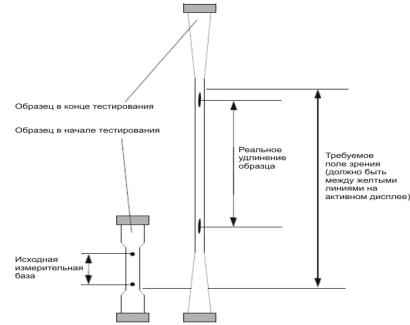
Рис. 3.7. Выбор поля зрения видеоэкстензометраAVE
–процедура калибровки;
–работа с «Мастером подготовки к работе с образцом»;
–работа с «Мастером подготовки к тестированию».
3.4. ОПТИЧЕСКИЙ МЕТОД АНАЛИЗА ПОЛЕЙ ДЕФОРМАЦИЙ. СОСТАВ И ПРИНЦИП РАБОТЫ ЦИФРОВОЙ ОПТИЧЕСКОЙ СИСТЕМЫ
К оптическим методам механики деформируемого твердого тела относятся методы, основанные на явлении фотоупругости (методы рассеянного света, фотоупругие покрытия, динамическая фотоупругость), методы муаровых полос (геометрический и интерференционный муар), голографическая и лазерная
93
спекл-интерферометрия, теневой оптический метод каустик [19, 24], а также метод корреляции цифровых изображений, или
digital image correlation (DIC) [28].
Методика корреляции цифровых изображений была впервые предложена в начале 80-х годов исследователями из университета Южная Каролина [29]. Позже метод был сформулирован для изучения проблем механики твердого тела.
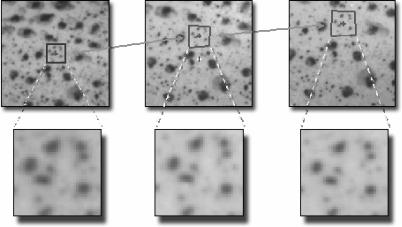
Корреляция цифровых изображений– это бесконтактный оптический метод регистрации полей перемещений и деформаций на поверхности объектов и элементов конструкций. Информация содержится в структуре или распределении пикселей с различным уровнемяркости черно-белогоизображения (рис. 3.8).
Основным предположением метода корреляции цифровых изображений является то, что распределение пикселей на снимке сохраняется при деформировании объекта, допускаются только перемещение, поворот, удлинение и/или искажение в соответствии с прикладываемой нагрузкой, то есть предполагается однозначное соответствие между фотографиями.
Рис. 3.8. Регистрация изменений распределения пикселей
сразличным уровнем яркости цифровых черно-белых фотографий
впроцессе нагружения
94
Если G (x, y) – функция, характеризующая уровень яркости пикселя с координатами x и y, расположенного внутри рассматриваемой области, то корреляционный алгоритм сводится к минимизации следующего выражения:
Σ |
x, y |
(G |
( x , y |
τ |
)− G ( x, y ))2 |
, |
(3.1) |
|
τ |
τ |
|
|
|
||
где |
|
|
|
|
|
|
|
Gτ ( xτ, yτ ) = g0 + g1G ( xτ, yτ ) |
(3.2) |
||||||
и |
|
|
|
|
|
|
|
|
x1 = a0 |
+ a1 x + a2 y + a3 xy , |
|
(3.3) |
|||
|
y1 = a4 |
+ a5 x + a6 y + a7 xy . |
|
(3.4) |
|||
Путем варьирования параметрами освещенности (g0 , g1 ) и параметрами аффинного преобразования (a0 ...a7 ) точность
измерений может быть достигнута вплоть до 0,01 пикселя.
На рис. 3.9 представлен вектор перемещения элемента поверхности исследуемого объекта. Центральная точка Р переместилась из исходного положения u в деформированное ν. При известных векторах перемещений каждой точки поверхности и её начальной геометрии могут быть вычислены деформации. Они могут быть получены непосредственно путем дифференцирования смещения соседних точек поверхности либо путем анализа искажений каждой соседней грани, которые используются для корреляции.
В технике корреляции цифровых изображений правильная калибровка камер оказывает существенное влияние на эффективность работы всей системы. При использовании одиночной камеры процесс калибровки сводится к простому определению масштабного коэффициента. Для трёхмерных систем процесс калибровки включает в себя совокупность операций, выполняемых с помощью калибровочных таблиц и с целью определения
95