Материал: Механика материалов. Методы и средства экспериментальных исследований
Несмотря на многообразие испытательных машин, все они создаются по единой функциональной схеме [20]. К числу основных систем испытательных машин можно отнести следующие:
–системы создания внешних воздействий, среди них раз-
личают устройства механической (рычажные, винтовые, гидравлические), физической (тепловые, электромагнитные, радиационные) и химической природы, а также устройства для размещения образца в необходимой по условиям испытаний среде (сосуды, камеры, печи, криостаты и т.д.);
–системы передачи нагрузки на образец, включающие
всебя захваты для установки и крепления образца, силовые рамы, траверсы, тяги и т.д.;
–системы измерения, включающие в себя первичные преобразователи (датчики) усилий, деформаций, температур и тому подобное, а также устройства преобразования электрических сигналов при их последующем использовании в системе обработки данных и управления;
–системы автоматизации эксперимента, позволяющие
осуществлять сбор и обработку информации, визуализацию и регистрацию результатов исследований, а также обеспечивающие реализацию программы автоматического управления процессом испытаний.
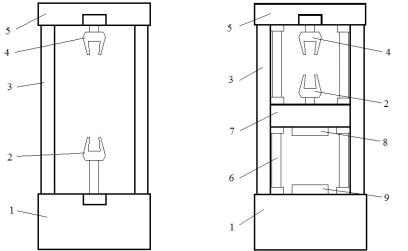
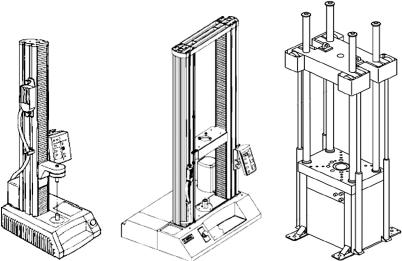
Испытательные системы конструктивно могут быть выполнены однозонными или двухзонными (рис. 2.2); одноколонными, двухколонными или четырехколонными (рис. 2.3).
Графическим результатом испытания является диаграмма растяжения (кручения), т.е. график зависимости между растягивающей силой P (крутящим моментом M кр ) и удлинением об-
разца ∆l (углом закручивания φ).
Компьютерная техника и специализированное программное обеспечение позволяют полностью автоматизировать управление ходом испытаний, начиная от пуска машины до вывода полученных результатов измерений на дисплей.
46
а |
б |
Рис. 2.2. Силовая схема однозонной (а) и двухзонной (б) испытательных машин: 1 – основание, 2 – подвижный захват, 3 – стойки, 4 – неподвижный захват, 5 – верхняя траверса, 6 – ходовые (силовые) винты, 7 – подвижная траверса,
8 – верхняя плита для сжатия, 9 – нижняя плита для сжатия
Современные нагружающие системы способны осуществлять квазистатическое и (или) циклическое нагружение при строгом (контролируемом с высокой точностью) соблюдении заданного закона нагружения. Как правило, может быть выбрано как «жесткое», так и «мягкое» нагружение. «Жестким» при этом считают такое нагружение образца, при котором контролируется перемещение (угол поворота) подвижного захвата машины. «Мягким» называют такое нагружение, при котором контролируется закон изменения нагрузки (крутящего момента).
Передача усилия на образец осуществляется через захваты. Современные испытательные системы используют очень широкий спектр устройств для крепления образцов в зависимости отвидаиособенностей испытаний. При этомзахваты могут
47
а |
б |
в |
Рис. 2.3. Конструктивное исполнение испытательных машин: одноколонные (а), двухколонные (б) и четырехколонные (в)
быть специализированными или универсальными. Наиболее актуальные типы универсальных захватов представлены на рис. 2.4.
Для обеспечения центральной передачи усилия на образец в машинах имеются специальные устройства (рис. 2.5). При использовании осесимметричных образцов для той же цели служат продольные пазы губок самоцентрирующих клиновых захватов (рис. 2.6).
Современные испытательные комплексы включают не только автоматизированную нагружающую систему, но и системы измерения. К ним, прежде всего, относятся датчики измерения деформации – тензодатчики, деформометры, экстензометры. Примером наиболее простого средства измерения деформации может служить механический деформометр Гугенбергера, представленный на рис. 2.7.
48
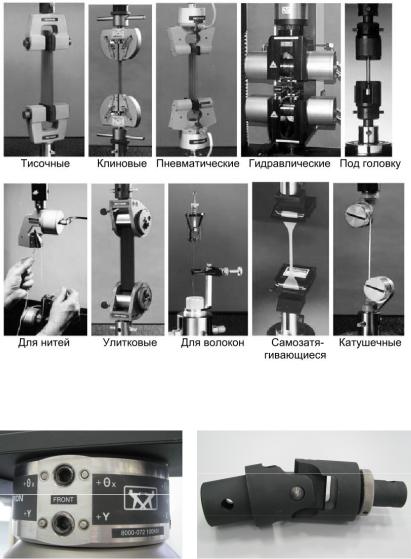
Рис. 2.4. Основные типы захватов
а |
б |
Рис. 2.5. Устройства центрирования при жестком креплении образца (а) и кардан для адаптивного крепления образца при растяжении (б)
49
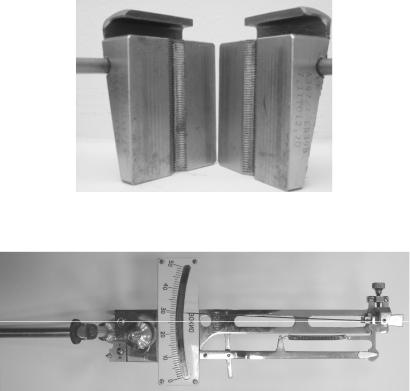
Рис. 2.6. Губки клиновых захватов для крепления осесимметричных образцов
Рис. 2.7. Механический деформометр Гугенбергера
Основные типы современных эсктензометров представлены на рис. 2.8.
Другой важнейшей частью систем измерения в испытательных машинах являются силоизмерители (датчики сил, динамометры). Как правило, датчики нагрузок устанавливаются в силовую цепь последовательно с испытываемым образцом. Основная конструктивная составляющая датчиков силы – это упругий элемент, который деформируется в результате приложенной к датчику нагрузки. Величину деформации упругого элемента тем или иным способом регистрируют и с использованием специаль-
50