Материал: Линьков С.А. Моделирование мехатронных систем
U |
ВХ |
, |
|
|
|
U |
ВЫХ |
|
|
||
ДВ
UТП
t
|
0 |
0 |
|
|
Рис. 1.16. Переходные процессы
|
ДВ |
и U |
|
ТП |
при частоте
|
0 |
|
U
ВХ |
, |
|
|
ДВ |
|
ДВ UТП
t
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
33
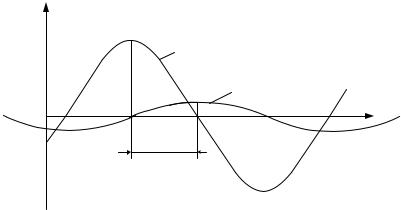
Рис. 1.17. Переходные процессы
U |
ВХ |
, |
|
|
|
|
ДВ |
|
|
|
UТП
|
2 |
|
1 |
|
|
|
ДВ |
и U |
|
ТП |
ДВ
при частоте С
t
Рис. 1.18. Переходные процессы при частоте СОПР
ДВ
и UТП
До частоты сопряжения
СОПР
амплитуда сигнала скорости
соответствует тому напряжению, которое подается на якорь, фазовый сдвиг по арктангенсальной зависимости увеличивается
до
45 |
0 |
|
, рис. 1.15. Дальнейшее увеличение частоты
UТП
приводит к уменьшению амплитуды скорости двигателя и увеличению фазового сдвига между сигналами, рис. 1.15.
Достигнув частоты среза, амплитуды обоих сигналов равны по значению L1 0 .
1.6. Описание среды визуального программирования MatLab Simulink для моделирования динамических звеньев и
структурных схем САР
1.6.1. Выборка и редактирование универсального блока Transfer Fcn
34
Программа Simulink является приложением к пакету MATLAB. При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний, требующихся при работе на компьютере и, естественно, знаний той предметной области, в которой он работает.
Simulink является достаточно самостоятельным инструментом MATLAB и при работе с ним совсем не требуется знать сам MATLAB и остальные его приложения. С другой стороны, доступ к функциям MATLAB и другим его инструментам остается открытым и их можно использовать в Simulink. Часть входящих в состав пакетов имеет инструменты, встраиваемые в
Simulink (например, LTI-Viewer приложения Control System Toolbox – пакета для разработки систем управления). Имеются также дополнительные библиотеки блоков для разных областей применения (например, Power System Blockset – моделирование электротехнических устройств, Digital Signal Processing Blockset
– набор блоков для разработки цифровых устройств и т.д).
При работе с Simulink пользователь имеет возможность модернизировать библиотечные блоки, создавать свои собственные, а также составлять новые библиотеки блоков.
При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц.
Для запуска программы необходимо предварительно запустить пакет MATLAB. Основное окно пакета MATLAB показано на рис. 1.19. Там же показана подсказка, появляющаяся в окне при наведении указателя мыши на ярлык Simulink в панели инструментов.
35
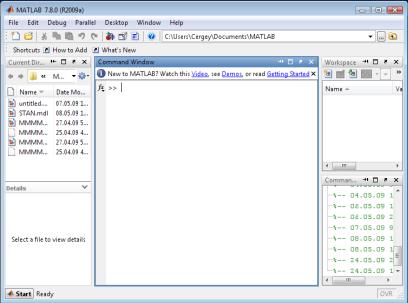
Рис 1.19. Основное окно программы MATLAB
После открытия основного окна программы MATLAB нужно запустить программу Simulink. Это можно сделать одним из трех способов (рис. 1.20):
•Нажать кнопку  (Simulink)на панели инструментов командного окна MATLAB.
(Simulink)на панели инструментов командного окна MATLAB.
•В командной строке главного окна MATLAB напечатать Simulink и нажать клавишу Enter на клавиатуре.
•В меню File открыть вкладку New - Model.
36
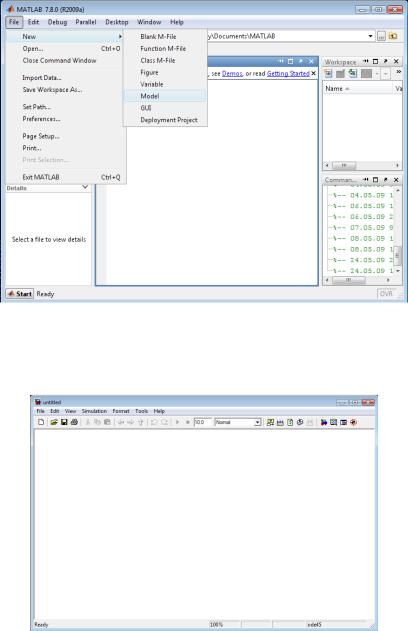
Рис. 1.20. Основное окно программы MATLAB
Появившееся окно – окно рабочей области, в которой можно собирать структурные схемы динамических систем (рис. 1.21).
Рис. 1.21. Окно рабочей области
37