Материал: Линьков С.А. Моделирование мехатронных систем
k |
|
dQ |
|
||
У |
|
du |
|
|
постоянный напряжения;
-расходный коэффициент сервоклапана,
практически во всем диапазоне изменения
k |
|
|
П |
|
|
|
|
|
|
|
dQ |
|
|
|
dР |
0 |
|
- коэффициент жесткости перепадно-расходных
характеристик сервоклапана при давлении в поршневой полости (Р0), принятом за начальное.
Уравнения, описывающие гидравлическое НУ, не учитывают
волновые процессы в трубопроводе между аккумулятором, сервоклапаном и гидроцилиндром;
падение давления в трубопроводе;
сухое трение.
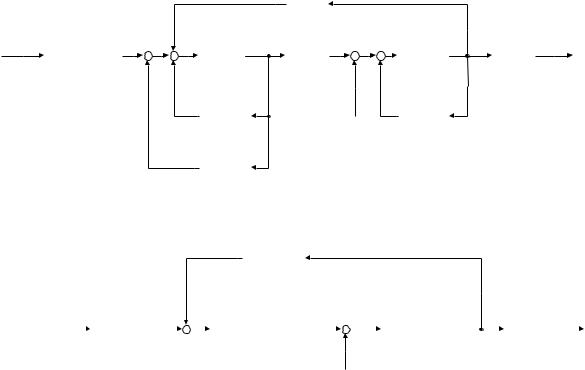
Сучетом принятых допущений на рис. 3.3 приведена структурная схема гидравлического НУ, построенная по приведенным выше уравнениям. С помощью структурных преобразований можно упростить схему и привести ее к виду, показанному на рис. 3.4.
Нажимное устройство фирмы DavyMckee оснащено двумя сервоклапанами на каждый гидравлический цилиндр, которые включаются в работу последовательно по мере увеличения сигнала задания. Особенностью конструкции является расположение блока сервоклапанов непосредственно на цилиндрах, что уменьшает длину гидравлических путей и повышает скорость реакции системы.
На рис. 3.5 показана структурная схема объекта регулирования гидравлического НУ, рассчитанная на основе исходных данных, приведенных в табл. 3.1, [20, 21].
113
|
Q( p) |
|
|
|
s |
S |
|
Сервоклапан |
|
|
|
|
Г |
V (р) |
|
|
|
|
ну |
u (р) |
у |
|
Q( p) |
- |
Е |
Р (р) |
|
1 |
1 |
S (р) |
у |
|
|
|
Г |
|
ну |
||||
к |
|
|
|
|
|
|
|
|||
|
1 Т |
р |
|
|
V p |
S |
|
m p |
p |
|
|
|
|
Г |
- |
|
|||||
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
Q(p) |
|
r |
|
|
|
|
|
Р(р) |
|
|
b |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Q ( p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
k |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.3. Структурная схема мехатронной системы гидравлического |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
нажимного устройства с сервоклапаном |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
Q(р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
s |
|
|
|
|
SГ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сервоклапан |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
uу(р) |
|
у |
- |
|
|
SГ |
|
п |
|
|
|
|
|
|
|
|
b |
|
|
1 |
S (р) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ну |
||||||||||||||
|
|
|
к |
|
|
|
r к |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 Ту р |
Q(р) |
1 |
|
|
V |
p |
- |
|
1 |
|
m |
p |
V (р) |
p |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
E (r к ) |
|
|
b |
ну |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Р(р) |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рис. 3.4. Преобразованная структурная схема гидравлического нажимного устройства
114
Таблица 3.1
Параметры модели гидронажимных устройств
Название параметра |
Обозначе |
Величина |
||||||||
|
ние |
|
|
|
|
|
|
|
|
|
Номинальное давление в |
Р |
|
2.5 10 |
7 |
н м |
|||||
напорной |
ГН |
|
|
|||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
магистрали сервоклапана |
|
|
|
|
|
|
|
|
|
|
Площадь поршня |
S |
Г |
0.73 м2 |
|||||||
гидравлического НУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приведенная масса |
m |
8 10 |
5 |
кг |
||||||
жидкости в |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
трубопроводе и |
|
|
|
|
|
|
|
|
|
|
механических частей |
|
|
|
|
|
|
|
|
|
|
Объем поршневой полости |
V |
183. 10 2 м3 |
||||||||
при полном |
|
|
|
|
|
|
|
|
|
|
ходе поршня |
|
|
|
|
|
|
|
|
|
|
Объемный модуль |
Е |
14. 10 |
9 |
н/м2 |
||||||
упругости рабочей |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
жидкости |
r |
|
|
|
|
|
|
|
|
|
Коэффициент утечек |
51. 10 |
14 |
|
м5/н с |
||||||
|
|
|
|
|
|
|
|
|
||
Номинальный расход |
Q |
|
2.3 10 |
2 |
3 |
|||||
сервоклапана |
ном |
|
|
|
|
м /c |
||||
|
|
|
|
|
|
|
|
|
|
|
Расходный коэффициент |
kУ |
2.3 10 3 м3/с В |
||||||||
Коэффициент жесткости |
kП |
2.4 10 |
12 |
|
м5/н с |
|||||
перепадно-расходных |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
характеристик |
|
|
|
|
|
|
|
|
|
|
Постоянная времени |
Tу |
3.6 мс |
||||||||
сервоклапана |
|
|
|
|
|
|
|
|
|
|
Коэффициент вязкого |
b |
16. 10 |
8 |
кг/с |
||||||
|
|
|||||||||
трения |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
115
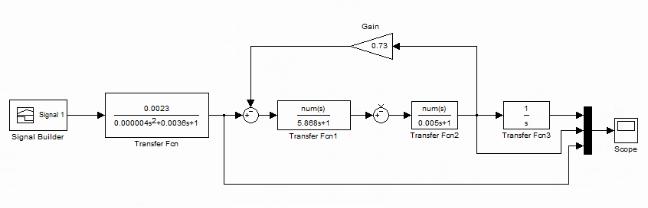
Рис. 3.5. Структурная схема объекта управления мехатронной системой гидронажимного устройства с среде Matlab Simulink
116
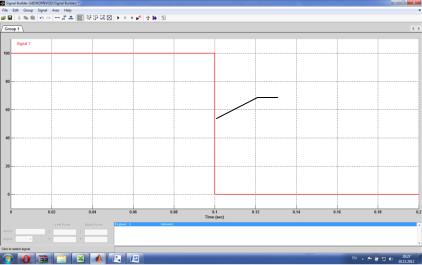
Гидравлическое НУ является объектом регулирования с параметрами, изменяющимися в широком диапазоне (объем поршневой полости, перепад давления на сервоклапане), что необходимо учитывать при настройке системы регулирования. На рис. 3.6 – 3.10 показаны результаты расчетов переходных процессов пуска и реверса мехатронной системы гидронажимного устройства с сервоклапаном.
Uу
Рис. 3.6. Скачкообразный сигнал задания Uу сервоклапана
Переходные процессы в гидравлической системе при подаче управляющего напряжения скачком (рис. 3.10), отражают высокое быстродействие сервоклапана. Величина потока Q достигает своего максимального значения примерно за 0,011 секунд. Качество переходных процессов потока Q гидравлической жидкости в мехатронной системе в динамике явно выраженное колебательное затухающее. Сигнал перемещения так же
колебательный и имеет перерегулирование
S
3%
.
116