Материал: Линьков С.А. Моделирование мехатронных систем
|
|
|
|
|
|
|
|
|
r |
i |
sx |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
u |
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 p |
|
|
sx |
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
sy |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
sr |
|
|
|
|
|
r |
|
|
i |
rx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 L |
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 p |
|
|
|
rx |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
ry |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
s |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
rx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 p |
|
|
ry |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
1 L |
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
r |
|
|
|
i |
ry |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
||
|
|
s |
|
|
|
|
sr |
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
sx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 p |
sy |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
r |
|
i |
sy |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
1 L |
|
s |
|
i |
sx |
|
|
|
i |
1 |
sx |
|
|
M |
|
sr |
|
|
|
|
sy |
|
|
|
|
|
|
|
|
sx |
|
1 |
M |
|
|
|
|
|
|
|
|
|
sr |
|
|
|
|
i |
|
i |
sy |
|
sy |
|
||
|
|
|
|
|
1 L |
|
|
|
|
|
s |
|
|
|
|
|
|
|
m |
с |
|
|
|
|
|
|
|
|
|
|
3 |
р |
|
|
|
р |
п |
|
|
|
|
|
|
|
||
2 |
п |
m |
|
Jp |
|
||
|
|
|
|||||
|
|
|
|
||||
Рис.2.47. Структурная схема АД при Us =Usx
103
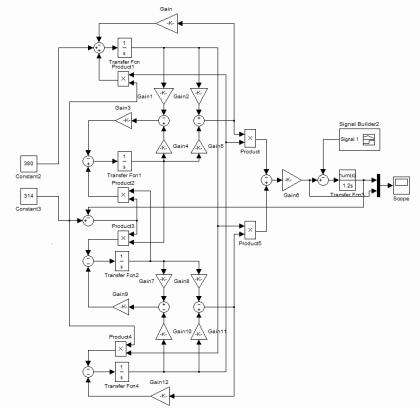
В качестве примера моделирования асинхронного двигателя по структурной схеме, приведённой на рисунке 2.47, берется электродвигатель серии АИР 132M-2, номинальной мощностью· 11кВт, номинальная скорость вращения 3000 об/мин, номинальное напряжение 380 В.
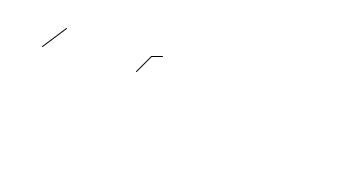
Рис. 2.48. Математическая модель АД с КЗР в среде Matlab Simulink (прямой пуск)
104
2000 |
|
|
|
|
|
|
|
|
|
|
1500 |
|
Мдв |
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
wдв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
t, c |
|
|
|
|
|
|
|
|
|
|
|
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
1,2 |
1,4 |
1,6 |
1,8 |
2 |
-500 |
|
|
|
|
|
|
|
|
|
|
-1000 |
|
|
|
|
|
|
|
|
|
|
-1500 |
|
|
|
|
|
|
|
|
|
|
-2000 |
|
|
|
|
|
|
|
|
|
|
Рис. 2.49. Переходные процессы момента и скорости АД с КЗР (прямой пуск двигателя)
Из рис. 2.49 видно, что при прямом пуске АД имеет место скачок пускового момента. Электромагнитный момент двигателя колеблется в широких пределах и имеет как положительный, так и отрицательный знак. В связи с этим, скорость двигателя нарастает неравномерно и также содержит колебательную составляющую.
Переходные процессы прямого пуска АД (рис. 2.49) не являются оптимальными с точки зрения плавности пуска двигателя в работу. Токи двигателя в этом режиме имеют 7-10 кратные значения, что неблагоприятно сказывается на питающую сеть, особенно если АД средней или большой мощности. Исходя из перечисленных недостатков, можно сделать вывод о том, что прямой пуск АД нецелесообразен для мехатронных систем, где необходим плавный способ регулирования скорости объекта регулирования.
На рис. 2.51 представлены сигналы задания напряжения двигателя и частоты питающей сети от задатчика интенсивности при частотном пуске АД, а на рисунке 2.52 переходные процессы момента и скорости АД с КЗР при частотном пуске двигателя по линейному заданию скорости.
105
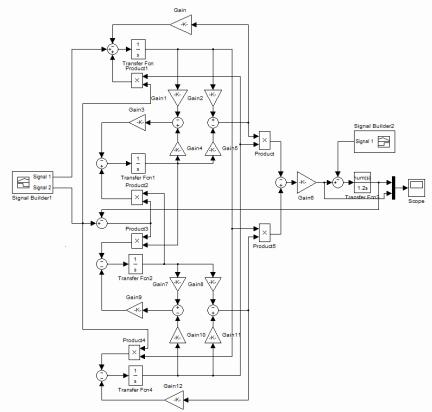
Рис. 2.50. Математическая модель АД с КЗР
в среде Matlab Simulink (частотный пуск двигателя от задатчика интенсивности)
106
Uдв
Wсети
Рис. 2.51. Сигналы задания напряжения двигателя и частоты питающей сети от задатчика интенсивности
350
300
250 |
wдв |
|
c 
200 |
|
|
|
|
|
|
|
|
150 |
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
Мдв |
|
|
|
|
|
|
|
|
Мст |
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
Мдин |
|
|
|
|
t, c |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
-50 |
|
|
|
|
|
|
|
|
-100
Рис. 2.52. Переходные процессы момента и скорости АД с КЗР (частотый пуск двигателя по линейному заданию скорости)
Моделирование частотного пуска АД осуществляется в течение 5ти секунд до номинальной скорости на холостом ходу, при этом динамический момент двигателя стабильный и постоянный, за исключением первой секунды, где мат. модель работает не стабильно. На 6ой секунде к двигателю
107