Материал: Линьков С.А. Моделирование мехатронных систем
При работе двигателя во второй зоне регулирования
допустимый ток якоря |
I |
ДОП |
, а соответственно и его перегрузочная |
|
|
|
способность должны снижаться, т.к. обмотка якоря находится под повышенным током.
На рис. 2.46 приведены переходные процессы |
U |
, |
|
, |
|
ВХ |
|
дв |
|
i |
дв |
, |
кФ |
при |
|
|
|
|
|
двигателя |
до |
|||
торможения.
приложении нагрузки скачком в момент разгона максимальной скорости и снятие её во время
U,кФ |
||
i |
, |
ДВ |
a |
|
|
UЯН
кФН
кФmin
мах
UЯ
iЯ
кФН
I |
I |
дин |
С |
|
IMAX
IС
Iдин 

|
|
|
|
|
|
|
|
|
t |
0 |
|
|
t1 |
t2 |
t3 |
t4 |
t5 |
t6 |
t7 |
I |
|
|
|
|
|
|
|
|
|
дин |
|
|
|
|
|
|
|
|
|
|
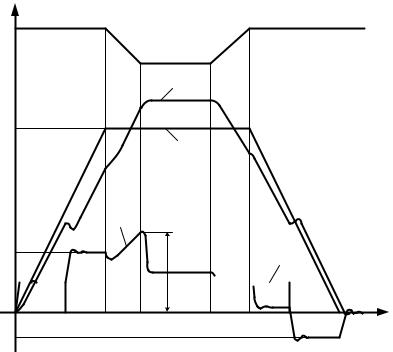
Рис. 2.46. Переходные процессы UВХ , дв , iдв , кФ |
||||||||
0 - |
t |
1 |
: разгон двигателя под под действием динамического |
||||||
|
|
|
|
|
|
|
|
|
|
тока. В момент времени t1 |
- прикладывается статическая нагрузка. |
||||||||
98

t |
1 |
|
t |
2 |
|
:
разгон под нагрузкой
I |
П |
I |
ДИН |
|
|
IC
,
из-за
приложения нагрузки скорость «просаживается», но т.к. напряжение якоря продолжает расти, под действием динамического момента двигатель продолжает разгоняться.
t |
2 |
t |
3 |
: напряжение якоря становится номинальным, поток |
|
|
|
снижается до минимального значения, ток растет до максимального значения, скорость продолжает расти от
номинального значения до
МАХ
.
t3 t4 : установившийся режим. Поток минимальный, скорость
максимальная, ток выше статического.
t |
4 |
t |
5 |
: поток увеличивается до номинального значения, ток |
|
|
|
якоря уменьшается до статического, скорость уменьшается до номинального значения.
t |
5 |
t |
6 |
: напряжение якоря уменьшается по линейному закону, |
|
|
|
поток номинальный, двигатель тормозится статической нагрузкой (двигательный режим), скорость продолжает уменьшаться.
t |
6 |
|
t |
7 |
|
: сброс нагрузки в момент времени
t |
6 |
|
, из-за чего
скорость незначительно увеличивается, а затем уменьшается до нуля под действием отрицательного динамического момента (генераторный режим).
2.7. Исследование переходных процессов асинхронного двигателя с короткозамкнутым ротором
2.7.1. Описание линейной математической модели асинхронного двигателя с короткозамкнутым ротором
Структурная схема математической модели АД, полученная на базе обобщенной машины имеет два управляющих воздействия
– напряжение статора и синхронную угловую частоту, формируемые преобразователем частоты.
В связи с этим ниже рассматривается построение варианта структурной схемы АД, когда в качестве опорного используется вектор напряжения статора Us, который совмещается с осью х. В этом случае скорость осей х – у равна синхронной ωк=ωs и
99
U |
sx |
U |
s |
, |
|
|
|
||
U |
sy |
0 |
|
|
|
|
|
|
и дифференциальные уравнения приобретают вид
U |
s |
U |
sx |
p |
sx |
|
|
sy |
r i |
sx |
, |
|
|
||||||
|
|
|
|
|
|
|
s |
|
|
|
s |
|
|
|
|||||
0 U |
sy |
p |
sy |
|
sx |
r i |
sy |
, |
|
|
|
||||||||
|
|
|
|
|
|
s |
|
|
|
s |
|
|
|
|
|
||||
0 U |
rx |
p |
rx |
( |
s |
|
) |
ry |
r i |
rx |
, |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
||||||
0 U |
ry |
p |
ry |
( |
s |
) |
rx |
r i |
ry |
. |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
r |
|
|||||||
(2.1)
(2.2)
В рассматриваемой структурной схеме АД для детального анализа при математическом моделировании предлагается выделить все переменные системы (2.2) в явном виде.
Из уравнений (2.2) можно записать операторные соотношения для потокосцеплений статора следующим образом
|
|
|
1 |
(U |
|
|
|
|
r i |
|
|
), |
|
|||||||
sx |
|
s |
|
|
sx |
|
||||||||||||||
|
|
p |
|
|
|
|
s |
sy |
|
|
|
s |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
( |
|
r i |
|
|
), |
|
|
|
|
|
|
|
||||
sy |
|
s |
sy |
|
|
|
|
|
|
|
|
|||||||||
|
|
p |
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
[( |
|
|
) |
|
|
|
r |
i |
|
|
], |
|||||
rx |
|
s |
ry |
|
rx |
|||||||||||||||
|
|
p |
|
|
|
|
|
|
|
r |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
[ ( |
|
|
) |
|
|
r |
i |
|
. |
|||||||
ry |
|
s |
rx |
ry |
||||||||||||||||
|
|
p |
|
|
|
|
|
|
|
|
|
|
r |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из уравнений записываются выражения функции потокосцеплений в виде
(2.3)
для токов как
100
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
sx |
|
|
rx |
, |
||
|
|
|
|
|
|
|
|
|
|
|
sx |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
M |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
sr |
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
sy |
|
|
ry |
, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
sy |
|
|
L |
M |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
sr |
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
rx |
|
|
sx |
, |
||
|
|
|
|
|
|
|
|
|
|
|
rx |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
M |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
sr |
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
ry |
|
|
sy |
, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
ry |
|
|
L |
M |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
sr |
|
|
|
|
|
|
|
L |
L |
|
|
M |
2 |
|
|
|
|
|
|||||||
|
L |
|
|
|
|
|
|
|
; |
|
|
|
|
||||||||||
|
|
|
|
|
s |
|
|
r |
|
|
|
|
|
sr |
|
|
|
|
|||||
|
sx |
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
L |
|
M |
2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
s |
sr |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
; |
|
|
|
|
|||||
где |
Lr |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
L |
|
|
M |
2 |
|
|
|
|
|||||||
|
M |
|
|
|
|
|
|
sr . |
|
|
|
|
|||||||||||
|
|
|
|
|
s |
|
|
r |
|
|
|
|
|
|
|
|
|||||||
|
|
sr |
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
sr |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Электромагнитный момент АД определяется уравнением
(2.4)
m |
|
3 |
p |
|
( |
i |
|
|
i |
|
), |
|
п |
sy |
sx |
||||||||
|
|
2 |
|
|
sx |
|
sy |
|
|||
|
|
|
|
|
|
|
|
|
|
|
а уравнение движения определяется соотношением
pп ( m mc ). Jp
Операторным и алгебраическим уравнениям (2.2-2.4), соответствует структурная схема АД, приведенная на рис. 2.47. Отметим, что данная структурная схема приведена в абсолютных единицах, синхронная скорость и скорость ротора – в эл. рад/с.
Как было указано, рассмотренная структурная схема имеет два управляющих воздействия – напряжение статора и синхронную угловую скорость (частоту), определяемые преобразователем частоты. Поэтому она может быть использована при анализе различных частотно – управляемых асинхронных электроприводов на ЦВМ, когда система
101
регулирования построена без использования теории обобщенной двухфазной электрической машины.
102