Материал: Линьков С.А. Моделирование мехатронных систем
Ф ФН
1 а
Ф
ФВ 0
|
I |
|
В |
0 |
I |
|
В0 |
б
I IВН 1
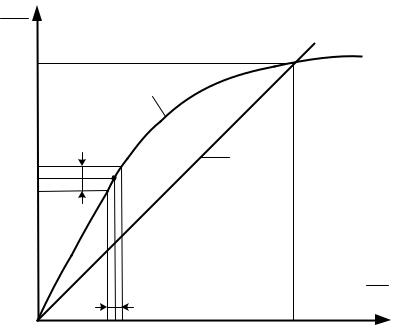
Рис. 2.23. Кривая намагничивания цепи возбуждения ДПТ с НВ
а – кривая намагничивания; б – линейная аппроксимация кривой
намагничивания;
Ф
- приращение потока;
IВ
- приращение тока
возбуждения
Кривая намагничивания имеет 3 участка:
1– линейный участок;
2– нелинейный участок;
3– область насыщения.
Магнитная система находится в области насыщения, когда величина магнитного потока остается постоянной вне зависимости от величины тока возбуждения.
Дифференциальное уравнение, описывающее поток возбуждения
|
R |
В |
U |
В |
|
|
|
|
|
Ф |
|
|
|
I |
|
, |
(2.1) |
||
|
|
|
|
||||||
В |
WВ |
|
|
|
|
В |
|
|
|
|
р RВ |
|
|
|
|
||||
78
где
R |
В |
- омическое сопротивление ОВ; |
||
|
|
|
||
WВ - число витков ОВ; |
||||
U |
В |
- напряжение ОВ; |
||
|
|
|
|
|
I |
В |
|
- ток ОВ. |
|
|
|
|
||
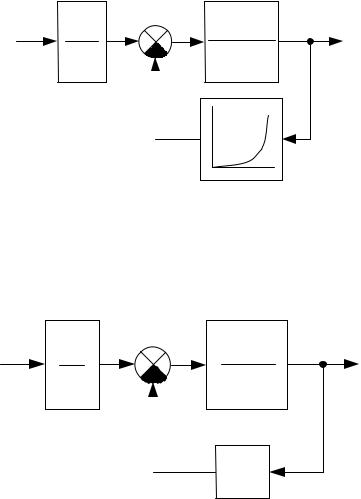
На основе уравнения (2.1) нелинейная цепь возбуждения может быть представлена структурной схемой вида, рис
UВ
1 RВ
 iВ
iВ
КВН
ТВН р
iВ
ФВ
ФВ
Рис. 2.24. Нелинейная цепь возбуждения
Если провести линейную аппроксимацию кривой намагничивания для какого-нибудь конкретного значения потока
Ф |
В0 |
, то структурная схема (рис. 2.24) преобразуется к виду, рис. |
|
|
2.25.
UВ
1 RВ
 iВ
iВ
КВН
ТВН р
Кi
ФВ
Рис. 2.25. Цепь возбуждения с линейно аппроксимированной
79
кривой намагничивания
I
Здесь Кi В
ФВ
, |
I |
|
В |
и ФВ
- относительно небольшие
приращения, полученные по кривой намагничивания.
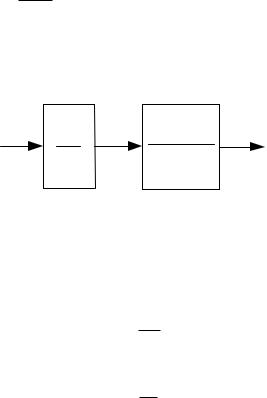
Если свернуть часть структурной схемы (рис. 2.25) и вывести передаточную функцию замкнутого контура, то получим структурную схему вида, (рис. 2.26).
UВ
1 RВ
iВ
КВ
ТВ р 1
ФВ
Рис. 2.26. Структурная схема цепи ОВ
В упрощенном виде цепь ОВ моделируется инерционным
звеном, где
к |
В |
,Т |
В |
|
|
- коэффициент и постоянная времени обмотки
возбуждения. Постоянную времени и коэффициент ОВ можно рассчитать по формулам
где
LВ
Т |
|
|
L |
, |
|
В |
|||
|
|
|
|
|
|
В |
|
R |
|
|
|
|
|
|
|
|
|
В |
|
-индуктивность цепи возбуждения.
кВ 1 .
Кi
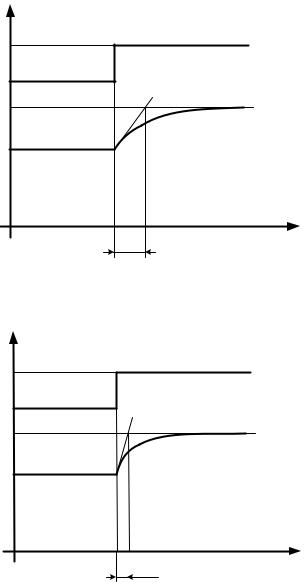
На рис. 2.27-2.28 приведены переходные процессы потока и напряжения обмотки возбуждения ДПТ для разных участков кривой намагничивания. На вход структурной схемы (рис. 2.24) подается скачок напряжения 10%.
80
U |
,Ф |
|
|
|
В |
В |
|
|
|
|
|
U |
|
|
0,4 UВН |
В |
|
|
|
|
|
|
||
0,3 UВН |
Ф |
|
|
|
|
Ф |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
Ф |
|
|
|
|
01 |
|
|
|
|
|
|
|
t |
|
|
ТВ1 |
|
|
|
|
Рис. 2.27. Переходные процессы U |
В |
и Ф |
|
|
|
|
|
|
|
для ненасыщенного участка |
|
|
U |
,Ф |
В |
В |
|
U |
|
ВН |
0,9 U |
|
|
ВН |
|
Ф |
|
2 |
UВ
Ф
Ф02
t  ТВ2ТВ1
ТВ2ТВ1
Рис. 2.28. Переходные процессы UВ и Ф для участка насыщения
81
По полученным переходным процессам можно сделать вывод о том, что чем насыщеннее магнитная система, тем меньше постоянная времени цепи ОВ. Если проанализировать
соотношение (2), то постоянная времени Т |
В |
зависит только от |
||
|
|
|
|
|
т.к. омическое сопротивление R |
В |
меняться не может. |
||
|
|
|
|
|
LВ
,
2.5. Исследование переходных процессов в двигателе постоянного тока при однозонном регулировании скорости
2.5.1. Разгон двигателя на холостом ходу до номинальной скорости и торможение до нуля
Вданном разделе с помощью известной динамической математической модели ДПТ с НВ [2]исследуются основные режимы работы двигателя при однозонном регулировании скорости:
- пуск двигателя на холостом ходу; - пуск, работа и торможение двигателя под нагрузкой;
- наброс нагрузки во время разгона двигателя и сброс во время торможения;
- приложение скачка напряжения якоря; - приложение номинальной нагрузки скачком при пониженном
напряжении якоря.
Модель двигателя исследуется с помощью пакета визуального программирования MatLab Simulink.
Втаблице 2.1 приведена расшифровка основных координат электропривода.
(
ФН
На рис. 2.29 приведена структурная схема ДПТ с НВ
=const).
UЯ
U |
1 / R |
I |
Я |
|
|
R |
Э |
|
|
|
|
Э |
|
|
|
|
|
||
Т |
Э |
р 1 |
|
|
Т |
М |
КФ |
р |
|
|
|
|
|
|
|
Н |
|
||
Е |
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
|
|
КФН 
Рис. 2.29. Структурная схема двигателя для работы на холостом ходу
82