Материал: Линьков С.А. Моделирование мехатронных систем
Во время переходного процесса
tпп
выходной сигнал
имеет экспоненциальный характер.
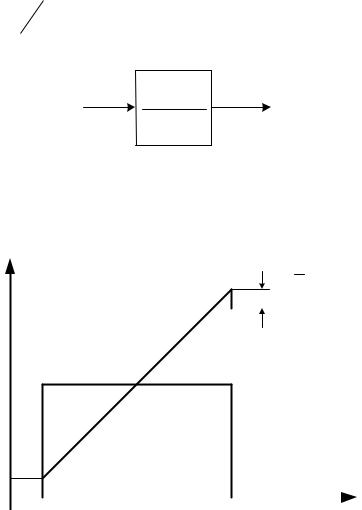
Построим кривые переходных процессов с выхода инерционного звена при линейном воздействии входного сигнала, (рис.2.8).
U |
ВХ |
,U |
ВЫХ |
|
|
U |
ВЫХ |
k U |
ВХ |
при k 1 |
|
|
|
U |
|
|
|
|
|
ВХ |
t |
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
t |
t |
t |
2 |
t |
3 |
t |
4 |
1 |
|
|
|
Рис. 2.8. Кривые переходных процессов с выхода инерционного звена при линейном воздействии входного сигнала
В промежутки
отстает от входного
времени t1 t2 |
|
и |
t3 t4 |
по времени на |
t |
о |
за счет |
|
выходной сигнал
инерции звена. С
момента времени
t |
2 |
|
выходной сигнал по экспоненциальной
зависимости стремится к входному.
2.2.3. Пропорционально-интегрирующее звено (ПИ-звено)
Передаточная функция пропорционально-интегрирующего
звена |
|
|
|
|
|
|
|
|
W |
( р) |
T3 p 1 |
|
|
T3 |
|
1 |
, |
|
|
|
||||||
3 |
|
T2 р |
T2 |
T2 p |
|
|||
|
|
|
||||||
63
где Т |
2 |
|
|
|
|
|
T |
|
ПИ-звена; |
|
3 |
|
|
|
На рис. |
||
- постоянная времени интегрирующей составляющей
T |
- пропорциональная составляющая ПИ-звена. |
|
2 |
||
|
2.9 показано обозначение ПИ-звена
UВХ
T |
|
p 1 |
|
3 |
|
|
|
|
T |
p |
|
|
|
2 |
|
UВЫХ
Рис. 2.9 Обозначение ПИ-звена
Построим кривые переходных процессов с выхода ПИ-звена при скачкообразном воздействии (рис. 2.10).
U |
ВХ |
,U |
ВЫХ |
|
|
UВЫХ
UВХ
U |
|
|
T |
|
3 |
||
|
|
|
|
|
ВХ |
|
T |
|
|
|
|
|
|
|
2 |
|
|
|
|
U |
|
|
T3 |
|
|
ВХ |
|
|
|||
|
T |
|
|||
|
|
t |
|||
|
|
2 |
|
||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
t1 |
t2 |
Рис. 2.10. Кривые переходных процессов с выхода ПИ-звена при скачкообразном воздействии
64
С момента времени |
t |
выходной |
сигнал |
1 |
|||
увеличивается пропорционально |
величине |
U |
|
|
|
|
ВХ |
последующим интегрированием входного напряжения.
скачком
|
T |
3 |
, с |
|
|||
|
|
|
|
|
T |
2 |
|
|
|
|
В момент
времени
выходной
t |
2 |
входной |
сигнал скачком уменьшается до нуля, |
|
|||
|
сигнал, в |
свою очередь, также пропорционально |
|
уменьшается на величину
UВХ
|
T |
3 |
|
||
|
|
|
|
T |
2 |
|
|
. С момента времени
t |
2 |
|
, за
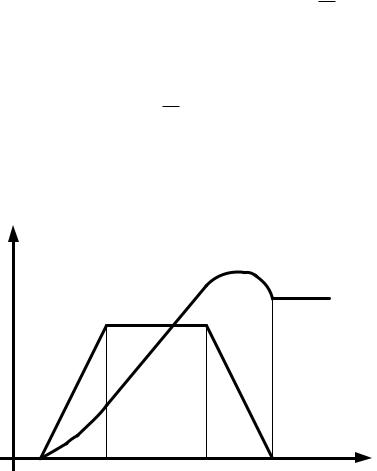
счет свойств интегратора, выходное напряжение не изменяется. Рассмотрим пример построения кривых переходных
процессов с выхода ПИ-звена при линейном воздействии входного сигнала, (рис. 2.11).
U |
ВХ |
,U |
ВЫХ |
|
|
UВЫХ
UВХ
t
t |
t |
2 |
t |
3 |
t |
4 |
1 |
|
|
|
Рис. 2.11. Кривые переходных процессов с выхода ПИ-звена при линейном воздействии входного сигнала
65
В промежутки времени |
t |
1 |
t |
2 |
|
|
|
представляет собой квадратичную
и |
t |
3 |
t |
4 |
выходной сигнал |
|
|
|
|
зависимость (параболу),
сложенную с пропорциональной составляющую ПИ-звена
UВЫХ |
t |
T3 |
UВХ t |
1 |
|
|
UВХ t dt . |
|||
T |
2 |
T |
2 |
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||
T T
3 2
2.2.4. Реально-дифференцирующее звено (реальное Д-звено)
Передаточная функция реального Д-звена |
|
|
|
|||||||
|
W4 ( р) |
T1 |
p |
|
T1 |
p |
|
1 |
|
, |
|
T2 |
р 1 |
T2 |
p 1 |
||||||
|
|
|
|
|
||||||
где T |
- постоянная времени дифференцирующего звена, |
|||||||||
1 |
|
|
|
|
|
|
|
|
|
|
T2 - постоянная времени апериодического звена. На рис. 2.12 показано обозначение реального Д-звена
UВХ
|
T |
p |
|
|
|
1 |
|
T |
|
p 1 |
|
2 |
|
|
|
UВЫХ
Рис. 2.12. Реальное Д-звено
Реальное Д-звено отличается от простого дифференцирующего звена апериодической составляющей. На практике применяется только реальное Д-звено, так как идеальное реализовать невозможно.
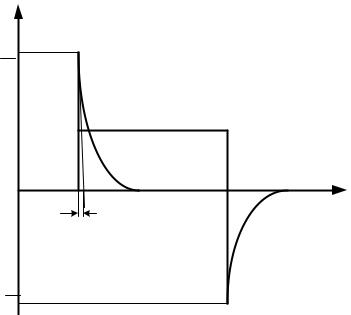
Получим кривые переходных процессов с выхода реального Д-звена при скачкообразном воздействии, (рис. 2.13).
66
U |
ВХ |
,U |
ВЫХ |
|
|
U |
|
|
T |
|
1 |
||
|
|
|
|
|
ВХ |
|
T |
|
|
|
|
|
|
|
2 |
UВХ
UВЫХ
t |
1 |
|
T |
2 |
|
U |
|
|
T |
|
1 |
||
|
|
|
|
|
ВХ |
|
T |
|
|
|
|
|
|
|
2 |
t |
2 |
|
UВЫХ
t
Рис. 2.13. Кривые переходных процессов с выхода реального Д-звена при скачкообразном воздействии
В момент времени
t1
происходит дифференцирование
скачкообразно изменяющегося входного напряжения, а затем экспоненциальный спад выходного напряжения до нуля,
вызванный |
постоянным (неизменным) |
напряжением |
U |
ВХ |
, |
|
|
|
|
|
|
|
|
|
|
Затем, с момента времени t2 |
|
|
|
|
UВХ |
0 . |
входное напряжение |
||||
скачком снимается, производная входного сигнала имеет отрицательный знак.
Пример построения кривых переходных процессов с выхода реального Д-звена при линейно изменяющемся входном сигнале,
рис. 2.14.
67