Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
|
|
|
|
Wрп (p) = |
TВ |
∑p + |
1 |
. |
(7.13) |
||
|
|
|
|
2T |
kвkотв p |
||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
µв |
RВ |
|
|
|
|
При реализации контура регулирования тока возбуждения (потока) |
||||||||||
необходимо предусмотреть меры по предотвращению снижения тока |
|||||||||||
возбуждения меньше минимального значения. |
|
|
|
||||||||
|
Пример 19. Реализовать функциональный преобразователь в цепи |
||||||||||
обратной связи по току возбуждения, моделирующий кривую |
|||||||||||
намагничивания электродвигателя (рис.7.9,б). |
|
|
|
||||||||
|
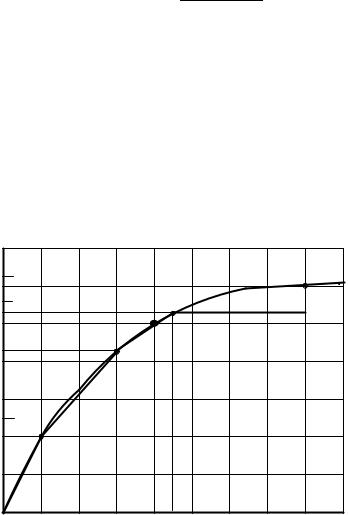
За исходную характеристику принимается кривая намагничивания |
||||||||||
электродвигателя |
Ф = f(Iв ) , |
приведенная |
в |
паспортных |
данных |
||||||
электродвигателя и представленная на рис.7.10 пунктирной линией. |
|||||||||||
|
uфп |
Ф |
|
|
|
|
|
|
|
|
|
8,6 |
8 |
Фн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6,9 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
3,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iвн |
|
|
|
|
|
|
2 |
4 |
6 |
8 |
|
10 |
|
|
uвх (Iв ) |
|
|
|
|
|
|
|
9,2 |
|
|
|
|
|
|
|
Рис.7.10. Линейная аппроксимация кривой намагничивания для |
|||||||||
|
|
|
|
реализации датчика потока |
|
|
|
||||
266

Принимается номинальное значение входной величины датчика потока (выход датчика тока возбуждения) равное 8В при номинальном токе возбуждения. При этом выходное напряжение датчика потока, соответствующее номинальному магнитному потоку, также принимается равным 8В. Выполняется кусочно - линейная аппроксимация кривой намагничивания с ограничением максимального выходного напряжения на уровне 8,6В (конечная точка третьего участка). При этом получилось четыре участка характеристики датчика магнитного потока.
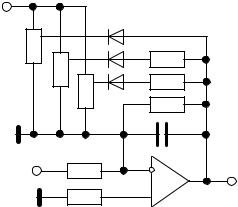
В соответствии с числом участков характеристики рис.7.10 (четыре участка) составляется принципиальная электрическая схема датчика потока (функционального преобразователя), реализованного на ОУ и представленная на рис.7.11.
Для запирания диодов в цепи обратной связи ОУ применяется отдельный источник питания Uип2 гальванически развязанный от источника питания ОУ.
Рассчитываются коэффициенты передачи на каждом из участков характеристики рис.7.10 для точек сопряжения прямых:
k1 = 32,2 =1,6; k2 = 6,69 −−32,2 = 0,9; k3 = 89,6,2−−66,9 = 0,53.
Затем задаются величиной сопротивления входного резистора R29 = 100 кОм и рассчитываются величины сопротивлений резисторов в цепи обратной связи ОУ:
267
+Uип2 |
|
|
|
R25 |
VD 3 |
|
|
VD 2 |
R32 |
||
|
|||
R26 |
VD1 |
R31 |
|
|
R27 |
R30 |
|
|
|
||
от ип2 |
|
С10 |
|
- uвх |
R29 |
uфп |
|
R28 |
|||
|
|
DA15
Рис.7.11. Принципиальная электрическая схема функционального преобразователя
R30 |
= k1 R29 |
=160кОм R31 = |
k1k2 |
R29 = 205кОм |
|
|
|||||
|
|
|
|
k1 − k2 |
|
R32 |
= |
k2k3 |
R29 =119кОм |
|
|
k2 − k3 |
|
|
|||
|
|
|
|
|
|
Исходя из стандартного ряда Е24, величины сопротивлений резисторов принимаются равными: R30=160 кОм, R31=200кОм,
R32=120кОм.
Величина емкости конденсатора C10 находится из равенства R30C10 = Tк , где Tк – постоянная времени контура вихревых токов.
Величины сопротивлений потенциометров R25 – R27 принимаются на порядок меньшими, чем величины сопротивлений
R31, R32, поэтому выбираются R25 = R26 = R27 = 20 кОм, типа СП5 - 2В, рассеиваемой мощностью 0,5 Вт и допуском ±5%, остальные
резисторы общего назначения типа МЛТ рассеиваемой мощностью 0,125 Вт допуском ±5%. Диоды VD1 – VD3 выбираются типа Д105, т.е. маломощные с малым обратным током величиной 0,005мА и напряжением 75 В.
На потенциометрах R27, R26, R25 выставляются значения напряжений, при которых происходит открывание диодов в
268

соответствии с реализуемой кривой (рис.7.11), т.е. 3,2В; 6,9В и 8,6В соответственно. После открывания диода VD3 происходит ограничение выходного напряжения ОУ на уровне 8,6В (коэффициент передачи равен нулю).
Контрольные вопросы:
1.В каких случаях применяют систему двухзонного регулирования скорости?
2.Как строится СУЭП двухзонного регулирования скорости, как осуществляется взаимосвязь между системами регулирования?
3.Поясните структурную схему объекта регулирования в двухзонной СУЭП.
4.Выведите передаточную функцию регулятора скорости в двухзонной СУЭП?
5.Почему необходимо изменять величину коэффициента усиления регулятора скорости во второй зоне регулирования?
6.Как выполняется адаптация регулятора скорости во второй зоне регулирования?
7.С какой целью осуществляется регулируемое токоограничение в данной СУЭП, как оно выполняется?
8.Как реализуется операция деления в регуляторе скорости с помощью множительного устройства?
9.Поясните вид электромеханических и механических характеристик в однократной системе регулирования, в чем их отличие?
10.Поясните вид электромеханических и механических характеристик в двукратной системе регулирования, в чем их отличие?
11.С какой целью в цепь обратной связи по току возбуждения включают фильтр и функциональный преобразователь?
12.Нарисуйте структурную схему контура регулирования тока возбуждения (магнитного потока).
13.Почему при реализации контура регулирования тока возбуждения переходят к регулированию магнитного потока?
14.Выведите передаточную функцию регулятора магнитного
потока.
15.Как реализуется функциональный преобразователь на операционном усилителе?
269

7.2.2. Настройка контура регулирования ЭДС
Внешним контуром регулирования скорости изменением магнитного потока является контур регулирования ЭДС электродвигателя. Структурная схема контура регулирования ЭДС представлена на рис.7.12. В контур регулирования ЭДС входят регулятор ЭДС (РЭ), замкнутый контур регулирования тока возбуждения (магнитного потока) ЗТВ, объект регулирования с передаточной функцией Wор2(р) и обратная связь по ЭДС, реализуемая с помощью датчика ЭДС.
Для настройки контура регулирования ЭДС на МО регулятор ЭДС должен иметь передаточную функцию:
|
W |
(p) = |
|
|
kоф |
|
|
ω |
= |
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
, |
|
(7.14) |
|
|||||||||||||
|
|
рэ |
|
|
|
|
4T |
pk |
оэ |
ω ω |
|
|
T |
p |
ω* |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
µв |
|
|
н |
|
|
|
иэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Tиэ = 4Tµвkоэωн / kоф - |
постоянная времени интегрирования |
|||||||||||||||||||||||||||||||
регулятора ЭДС, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
ω* = ω/ ω |
|
- |
относительная |
величина |
|
скорости вращения |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
электродвигателя. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
РЭ |
|
|
|
|
|
|
ЗТВ |
|
|
|
|
|
ω |
|||||||||
|
uзэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kФ |
|
|
|
|
Ea |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
Wрэ(р) |
|
|
|
Wзтв(р) |
|
|
|
1 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uоэ |
|
|
|
|
|
|
|
|
|
|
|
ДЭ |
|
|
|
|
|
|
Wор2 (p) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kоэ |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.7.12. Структурная схема контура регулирования ЭДС
Так как параметры объекта регулирования зависят от скорости вращения электропривода, то настройка контура регулирования ЭДС должна изменяться во второй зоне (при ослаблении магнитного потока) обратно пропорционально относительной скорости вращения электропривода, т.е. постоянная времени РЭ во второй зоне должна изменяться в соответствии с (7.14). Функциональная схема РЭ приведена
270