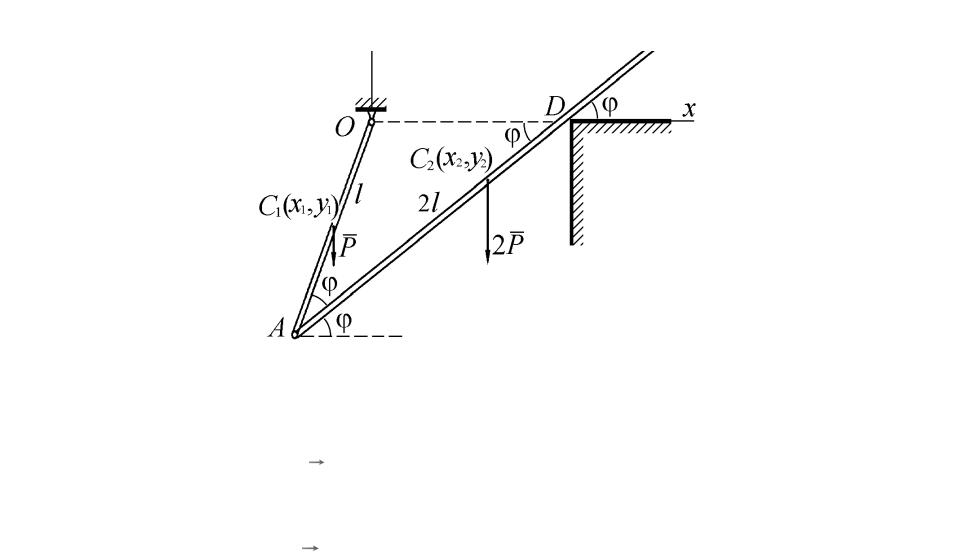
3.55. Условия равновесия механической системы в обобщенных координатах
N
A = Fk rk = 0
k =1
rk = rk (q1, q2 , ..., qn )
n
A = Qi qi = 0
i =1
Q1 = 0, Q2 = 0, … , Qn = 0.
332
Для равновесия механической системы с голономными, удерживающими, стационарными и идеальными связями необходимо и достаточно, чтобы все обобщенные силы, соответствующие выбранным обобщенным координатам, равнялись нулю.
333
Для потенциального поля:
Qi
= −
(i = 1, 2, …, n).
qi
= 0
(i = 1, 2, …, n).
qi
0
Если в данном положении механической системы её потенциальная энергия достигает экстремального значения, то это положение является положением равновесия системы.