Если связи, наложенные на механическую систему, голономные и удерживающие, то число независимых параметров, однозначно определяющих положение точек системы, называют числом степеней свободы этой системы (n).
Независимые между собой параметры, которые однозначно определяют положение механической системы в пространстве в любой момент времени, называются обобщенными координатами
(q1, q2, ..., qn ).
301
Радиус-векторы и координаты точек системы:
rk =rk (q1, q2, ..., qn, t)
xk = xk(q1, q2, …, qn, t),
yk = yk(q1, q2, …, qn, t),
zk = zk(q1, q2, …, qn, t).
(k = 1, 2, …, N).
302
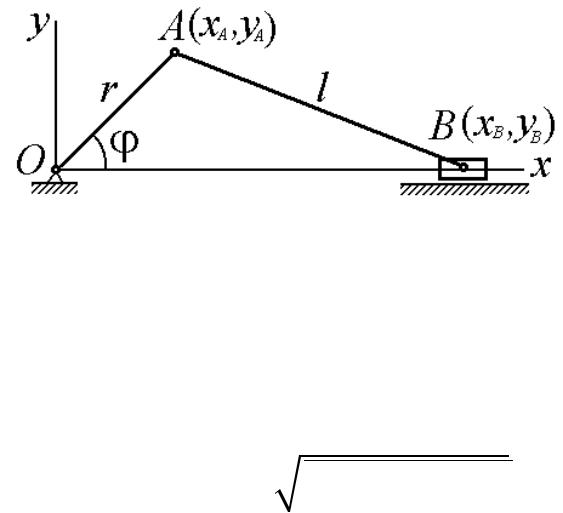
n =1; q ;
xA = r cos ; yA = r sin ;
xB = r cos + l2 − r2 sin2 ; yB = 0.
303
Уравнения движения голономной механической системы:
q1 = q1(t), q2= q2(t), … , qn= qn(t).
Обобщенные скорости и обобщенные ускорения.
dq
d2q
i
i
(i= 1, 2, … , n)
qi =
dt
, qi =
dt 2
304
3.51. Возможные перемещения
Голономная удерживающая связь (точка перемещается по поверхности):
f(x, y, z, t) = 0.
(1)
Действительным перемещением точки
dr
за время dt
называется такое элементарное перемещение, которое она фактически совершает в пространстве за время dt при данных связях.