Скачать файл
Заказать новую работу
2. Стационарные и нестационарные
Стационарная связь выражается уравнением (или неравенством), не содержащим в явном виде время.
fj (xk, yk, zk) = 0 - уравнение стационарной и голономной связи.
fj (xk, yk, zk, t) = 0 - уравнение нестационарной и голономной связи.
296
3. Связь называется удерживающей или двусторонней,
если она выражается уравнением (равенством).
Неудерживающими или односторонними связями называются связи, описывающиеся неравенствами.
297
3.50. Обобщенные координаты
Система:
-N материальных точек;
-3N декартовых координат;
-s голономных удерживающих связей:
fj (xk, yk, zk, t) = 0,
(k = 1, 2, …, N), (j = 1, 2, ..., s).
Независимых переменных n = 3N – s .
298
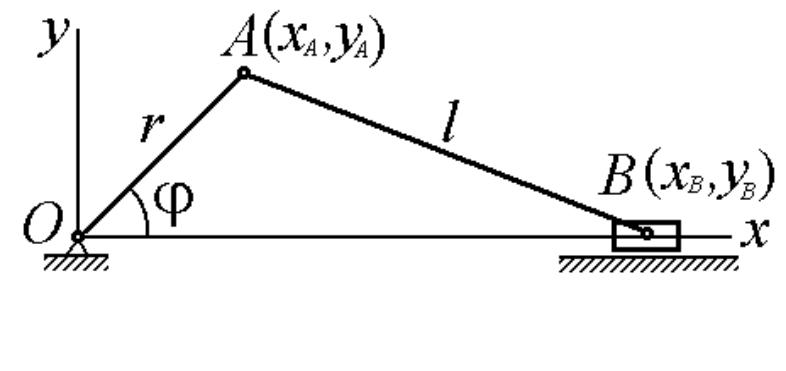
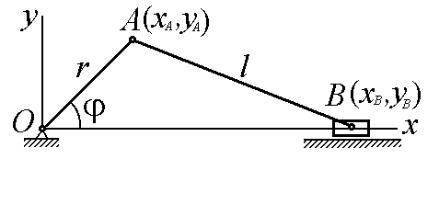
Пример кривошипно-ползунного механизма.
N=2: (т. А; т. В)
299
Связи:
zA = zB = 0
xA2 + yA2 − r 2 = 0
(xA – xB)
2 y 2
2
+ A
– l = 0,
yB = 0.
n=3·2-5=1
300