Материал: ДИНАМИКА
С учетом (5) имеем: |
|
(теорема о количестве |
|
0 |
|
|
движения системы) |
|
|
|
dK |
N |
dQ |
N |
(6) |
||
Cr |
= rC |
Fk(e) − |
|
|
+ k Fk(e) |
|
|
|
|
||||
dt |
k =1 |
dt |
k =1 |
|
||
dKCr = |
F(e) |
или |
dKCr = M C(e) |
(7) |
||
|
|
N |
|
|
|
|
|
|
k k |
|
|
|
|
|
|
|
dt |
|
||
dt |
|
|
||||
k =1 |
|
|
||||
Производная по времени от главного момента количеств движений системы относительно центра масс равна главному моменту всех действующих на систему внешних
сил относительно центра масс. |
161 |
|

3.27. Законы сохранения главных моментов количеств движения системы
Теорема о моменте количества движения в векторной и аналитической формах:
dKO |
= M O( e ) |
(1) |
|
dt |
|||
|
|
dK x |
= M x(e) |
dK y |
= M (e) |
dK z |
= M z(e) |
(2) |
|
dt |
dt |
||||||
dt |
|||||||
|
y |
|
|
||||
|
|
|
|
|
|
162
1. |
N |
|
M O(e) = rk Fk(e) = 0 |
(3) |
k =1
Из уравнения (1): |
KO = const |
(4) |
Если главный момент всех внешних сил, приложенных к точкам механической системы, относительно неподвижного центра О равен нулю, то главный момент количеств движения системы относительно того же центра постоянен и по величине и по направлению.
163
2. |
N |
|
MO( e ) = rk Fk(e) 0 |
k =1 |
(5) |
|
N |
||
|
||
M x( e ) = mx (Fk(e) ) = 0 |
|
|
k =1 |
|
Из уравнений (2):
Kx = const. |
(6) |
Если сумма моментов всех внешних сил, действующих на механическую систему, относительно какой-либо оси равна нулю, то главный момент количеств движения системы относительно этой же оси остается
164
постоянным.
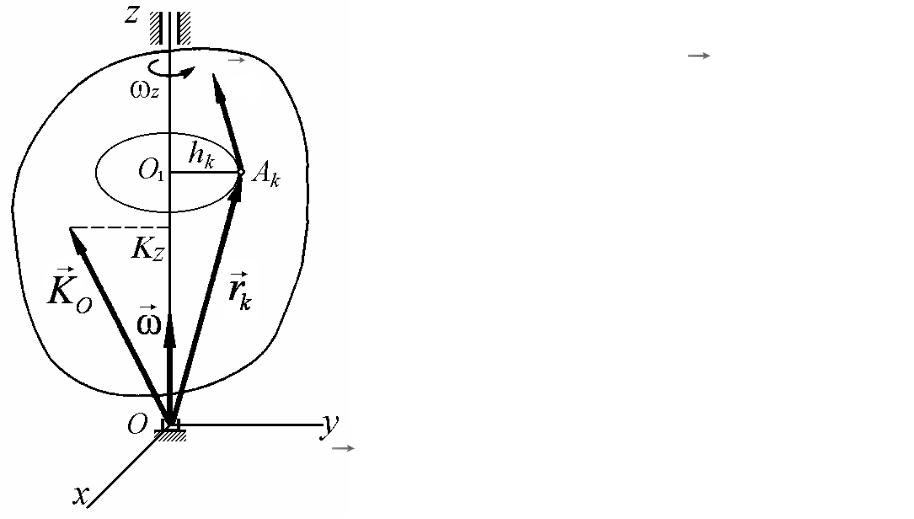
Лекция 6 3.28. Главный момент количеств движения
твердого тела относительно оси вращения
Главный момент количеств движения (кинетический момент) относительно оси:
|
|
|
|
N |
|
|
|
|
|
|
v k |
K |
z |
= |
|
m |
(m v |
k |
) |
|
(1) |
|
|
|
z |
k |
|
|
|
|||
|
|
|
|
k =1 |
|
|
|
|
|
|
|
Скорость k-й точки тела: |
|
|
|
||||||
|
|
|
|
vk = z hk |
|
|
|
(2) |
||
|
Момент количества движения точки |
|||||||||
|
|
|
|
относительно оси |
|
|
||||
mz (mkvk ) = mkvk hk = mk z h |
2 |
(3) |
||||||||
|
||||||||||
|
|
|
|
|
|
|
|
|
|
165 |
k