Материал: ДИНАМИКА
|
v = dt |
||
|
|
dr |
- скорость точки (8) |
|
|
|
|
|
r |
||
О |
r |
||
|
|
|
|
|
r |
|
||
r |
dKO |
|
||
u = |
|
|
(9) |
|
dt |
||||
r |
|
|||
K O |
- скорость конца вектора |
|||
О |
кинетического момента |
|
||
|
|
|||
156
Сравнивая равенства (6) и (9):
r r (e) u = MO
При движении механической системы скорость конца вектора главного момента количеств движения системы относительно некоторого центра равна главному моменту всех внешних сил, приложенных к системе относительно того же центра.
157
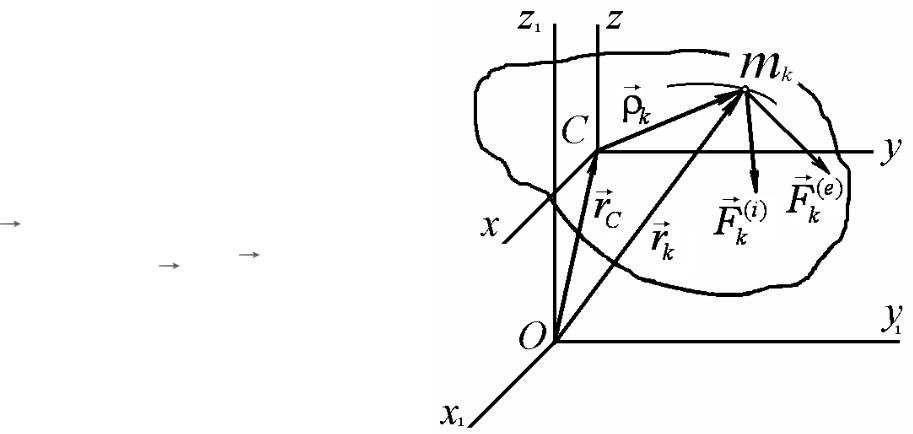
3.26. Теорема о главном моменте количества движения механической системы относительно центра масс
Ox1y1z1 – основная («неподвижная») система координат
Сxyz – поступательно движущаяся система координат с началом в центре масс
Теорема о главном моменте количества движения:
dKO |
N |
|
|
= rk Fk(e) |
(1) |
||
|
|||
dt k =1 |
|
||
В абсолютном движении
KO = KCr + rC Q |
(2) |
rk = rC + k
Следовательно
d |
N |
|
|
(KCr + rC Q) = (rC + k ) Fk(e) |
(3) |
||
dt |
|||
k =1 |
|
159
или
dr |
|
|
|
|
||
|
C |
Q =vC |
MvC |
= 0 |
|
(5) |
|
||||||
0 |
dt |
|
|
|
|
|
dKCr |
+ |
drC |
Q + r |
dQ |
= |
|
|
|
|||
dt |
|
dt |
C |
dt |
|
|
|
|
|||
|
N |
N |
|
(4) |
|
= rC Fk(e) + k Fk(e) |
|||||
|
k =1 |
k =1 |
|
|
|
160