Материал: ДИНАМИКА
Количество движения системы в ее движении относительно центра масс равно нулю.
N |
d |
N |
0 |
|
|
|
|||
mkvkr = |
|
mk k = 0 |
(8) |
|
|
||||
k =1 |
dt k =1 |
|
|
|
равенство (7) принимает вид
KO = KCr + rC MvC = KCr + mO (Q) |
(9) |
|
где |
N |
|
KCr |
= k mkvkr |
(10) |
k =1
относительный кинетический момент относительно
центра масс C. |
141 |
|

Главный момент количеств движения механической системы относительно неподвижного центра О равен геометрической сумме главного момента количеств движения системы относительно центра масс и
момента главного вектора количеств движений
Q
относительно центра О в предположении, что он приложен в центре масс системы.
142
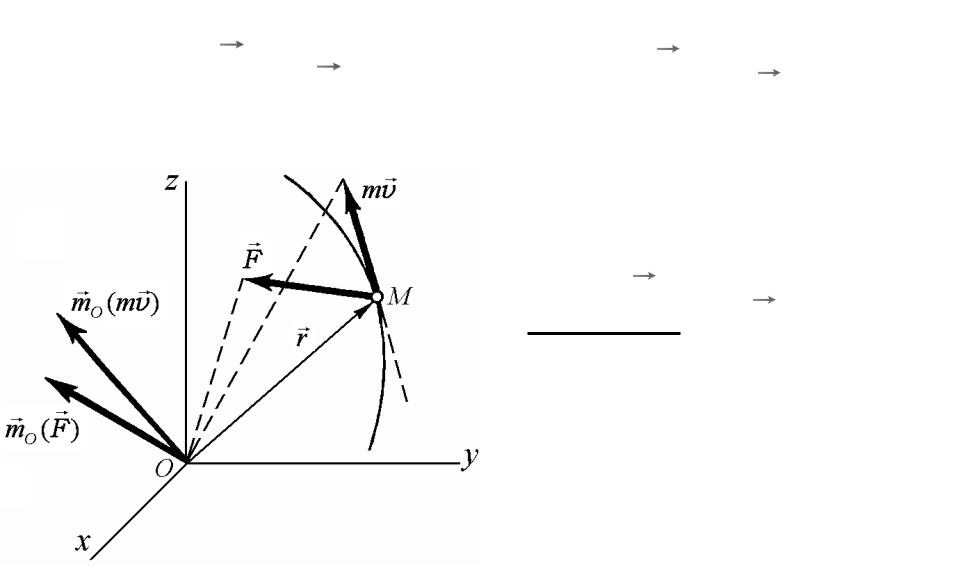
3.24. Теорема о моменте количества движения материальной точки
Дифференциальное уравнение движения точки
|
d 2r |
= F |
|
m |
dv |
= F |
m dt2 |
или |
dt |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d (mv ) = F dt
(1)
(2)
143
Умножим теперь обе части равенства (2) векторно слева на радиус-вектор r
d (mv )
|
|
= r F |
(3) |
|
r dt |
||||
|
||||
Учтем, что
0
d |
|
dr |
mv + r |
d(mv) |
|
dt |
(r mv) = dt |
dt |
(4) |
||
|
|
|
|
|
|
144
В результате: |
d |
(r mv) = r F |
(5) |
dt |
|||
|
|
В проекциях на неподвижные декартовы оси координат имеем
dkdtx = mx (F )
dky |
(F ) |
|
|||
|
|
|
= my |
(6) |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
dkz |
= m (F ) |
|
||
|
|
|
|||
|
dt |
|
z |
|
145 |
|
|
|
|
||