Материал: ДИНАМИКА

Главным моментом количеств движения механической системы относительно некоторого центра О называется геометрическая сумма моментов количеств движения точек системы относительно того же центра.
N |
N |
mkvk |
|
KO = kO |
(mkvk ) = rk |
(4) |
|
|
|
|
|
k =1 |
k =1 |
|
|
136
Проекции вектора кинетического момента системы:
N
Kx = е mk (ykvkz - zkvky ), k= 1
N |
|
|
Kz = е mk (xkvky - ykvkx ). |
(5) |
|
k= |
1 |
|
N
Ky = е mk (zkvkx - xkvkz ), k= 1
137
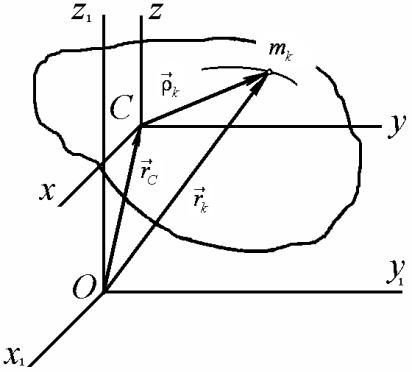
Связь между кинетическим моментом системы относительно некоторого неподвижного центра и относительно центра масс системы.
Ox1y1z1 - основная (условно неподвижная) система координат. Сxyz - подвижная система координат с началом в центре масс С движется поступательно по отношению к основной системе отсчета Ox1y1z1. (система координат
138
Кенига).
r |
r |
r |
rk |
= rC |
+ r k |
r
r k – радиус-вектор точки относительно центра масс
Абсолютная скорость точки mk :
|
|
r r r |
|
|
r |
vk = vC + vkr |
(6) |
|
|
|
|
|
vkr |
– относительная скорость |
|
r |
r |
|
|
vke |
= vC |
– переносная скорость |
|
139
|
N |
|
|
KO = rk mkvk = |
|
|
|
|
k =1 |
|
|
N |
|
|
|
= (rC + k ) mk (vC +vkr ) = |
|
||
k =1 |
|
|
|
N |
N |
0 |
(7) |
|
|||
= rC vC mk + rC mkvkr + |
|
||
k =1 |
k =1 |
0 |
|
N |
N |
|
|
|
|
||
+ mk k vC + k mkvkr |
|
||
k =1 |
k =1 |
|
|
140