Материал: ДИНАМИКА
x |
= |
m1x1 +m2 x2 |
; |
x = |
m1(x1 + x) +m2 (x2 + s + x) |
|
|
|
|||||
C0 |
|
m1 +m2 |
C |
m1 |
+m2 |
|
|
|
|
||||
m1x1 +m2 x2 = m1 (x1 + x) +m2 (x2 + s + x) |
|
m1 +m2 |
m1 +m2 |
131

m1 x1 + m2 x2 = m1 (x1 + x) + m2 (x2 + s + x)
m1 x1 + m2 x2 = m1 x1 + m1 x + m2 x2 + m2 s + m2 x
0 = m1 x + m2 s + m2 x
x = − |
m2 |
s |
m1 + m2 |
132

Qx0 = m1 v0 + m2 v0
m1 v0 + m2 v0 = m1 v + m2 (v + u)
v =v0 − m2 u m1 +m2
s2 = s1 − m2 s m1 +m2
s = s1 −s2 = m2 s m1 +m2
(7)
(8)
(9)
(10)
(11)
133
Лекция 5 3.23. Момент количества движения точки и главный момент
количеств движения механической системы
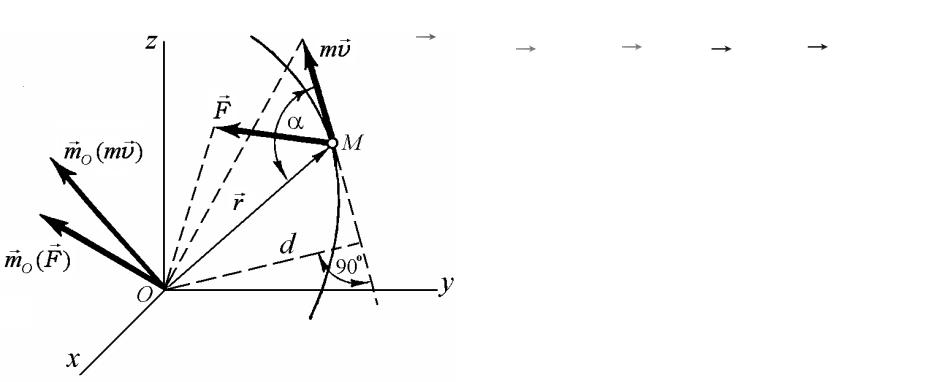
Момент количества движения материальной точки относительно некоторого центра O есть векторное произведение радиус-вектора точки, проведенного из этого центра, на количество движения точки:
kO = mO (mv) = r mv (1)
134

Проекции вектора момента количества движения точки
F
относительно центра О на прямоугольные декартовы оси координат равны моментам количества движения относительно соответствующих осей координат:
Так как |
(kO ) |
|
= kx |
, (kO ) |
= ky , |
(kO ) |
= kz . |
|||
|
x |
|||||||||
|
|
|
|
|
y |
|
|
|
z |
|
|
|
|
|
|
|
i |
j |
k |
|
|
|
|
|
|
|
|
|
|
|||
|
kO = r mv = m |
x |
y |
z |
|
(2) |
||||
то |
|
|
|
|
vx |
vy |
vz |
|
|
|
|
|
|
|
|
||||||
kx = m(yvz – zvy), |
ky = m(zvx – xvz), |
kz = m(xvy – yvx). (3) |
||||||||
|
|
|
|
|
|
|
|
|
|
135 |