Материал: ДИНАМИКА
Подставим значения координат, в выражение момента
инерции JOz. |
N |
|
JOz = mk [(x1k +xC )2 + ( y1k + yC )2 ] = |
|
k =1 |
N |
N |
0 |
|
||
= mk (x12k + y12k ) + 2xC mk x1k + |
||
k =1 |
k =1 |
|
N |
N |
+2 yC mk y1k0 |
+(xC2 + yC2 ) mk = |
k =1 |
k =1 |
N |
|
|
|
|
|
m (x2 |
+ y2 |
) + d 2 M . |
101 |
k 1k |
1k |
|
|
k =1
JOz |
= JCz + Md 2 |
(3) |
|
1 |
|
Момент инерции механической системы относительно данной оси равен моменту инерции относительно оси, ей параллельной, проходящей через центр масс системы, сложенному с произведением массы всей системы на квадрат расстояния между осями.
JOz JCz1
102
Лекция 4 3.15. Количество движения точки и механической
системы. Элементарный и полный импульс силы
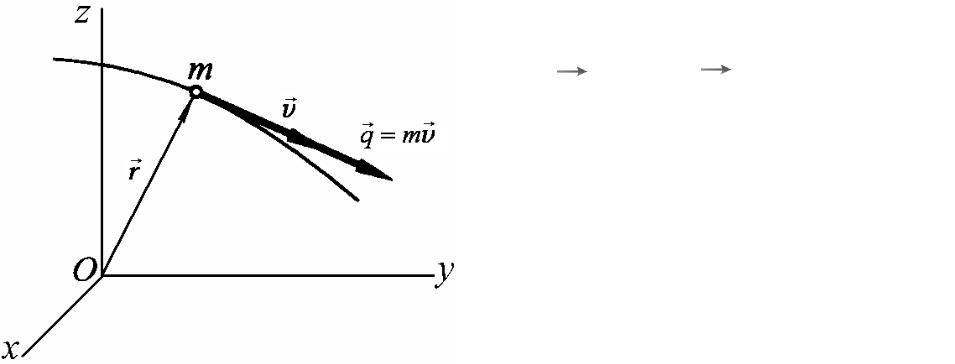
Количество движения материальной точки:
q = mv (1)
Проекции вектора количества движения:
qx = mvx, qy = mvy, qz = mvz . (2) |
103 |
|

Главный вектор количеств движения точек системы или количество движения механической системы:
N |
|
Q = mkvk |
(3) |
k =1
Проекции вектора Q:
|
N |
|
|
N |
|
|
N |
|
|
|
Q = |
|
m v |
; Q = |
|
m v ; |
Q = |
|
m v |
kz |
(4) |
x |
|
k kx |
y |
|
k ky |
z |
|
k |
|
|
|
k =1 |
|
|
k =1 |
|
|
k =1 |
|
|
|
104
Вывод формулы для вычисления величины |
: Q |
Из определения центра масс: |
|
N |
|
mkrk = MrC |
(5) |
k =1 |
|
Дифференцируя, получим
N |
drk |
|
drC |
|
N |
mk |
= M |
или |
mkvk = MvC (6) |
||
k =1 |
dt |
|
dt |
k =1 |
|
|
|
vC |
– скорость центра масс системы. |
105 |