Материал: Д6757 Балюбаш ВА Средства автоматизации Ч1
Рис. 2
Между статической и предельной динамической тяговыми электромеханическими характеристиками при одном и том же напряжении лежит множество динамических тяговых характеристик (Q1, Q2), определяемых видом механических характеристик ЭМ.
Под механической характеристикой ЭМ или, противодействующей, понимают зависимость Qмех ( ), результирующей силы сопротивления движению якоря, приложенной к нему и приведѐнной к рабочему зазору , от величины последнего (или момента сопротивления от угла поворота якоря).
2.3. Динамика электромагнита
Под инерционностью ЭМ понимают запаздывание перемещения якоря по сравнению с изменениями входного напряжения. Она определяется отставанием изменения тока в обмотке от изменения приложенного к ней напряжения и механической инерцией якоря, и связанных с ним подвижных частей. Динамические свойства ЭМ
11
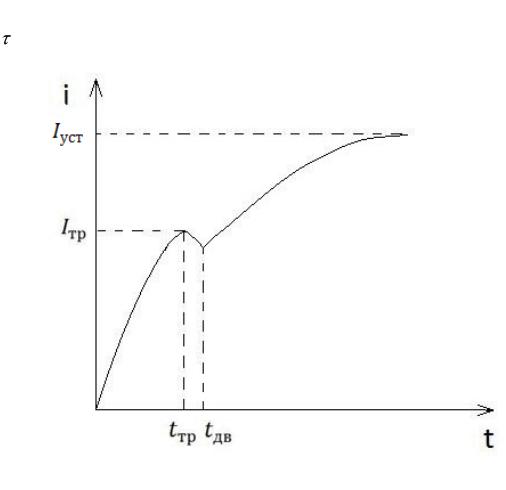
как элемента дискретного действия характеризуются временными параметрами: временем срабатывания tсрб и временем отпускания tотп (рис. 3).
 ,
,
где  н – электромагнитная постоянная времени обмотки.
н – электромагнитная постоянная времени обмотки.
Рис. 3
2.4. Электромагниты поляризованные
Принципиальное отличие поляризованных электромагнитов от нейтральных состоит в зависимости направления перемещения якоря от полярности управляющего напряжения Uр прикладываемого к рабочей обмотке (рис. 4).
12
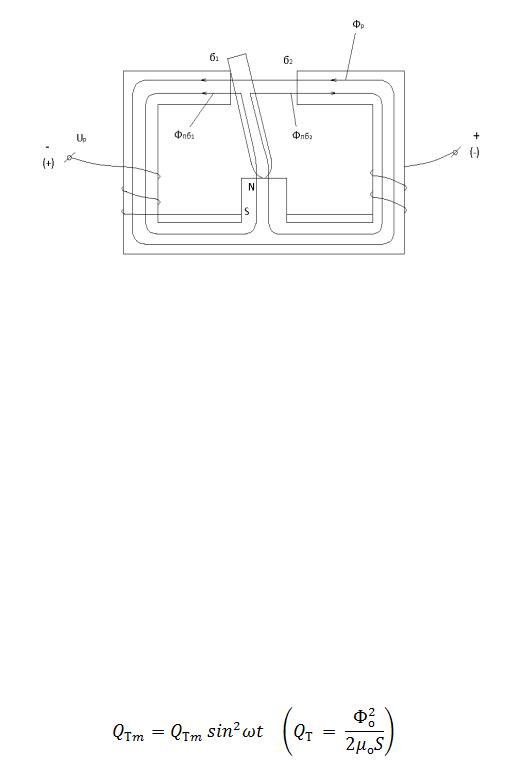
Рис. 4
Это достигается наведением двух магнитных потоков: Фр – создаваемого постоянным напряжением полярность которого может меняться, и поляризующего Фп образуемого или постоянным магнитом, или электромагнитом постоянного тока с неизменной полярностью питающего напряжения.
Различают три основные конструктивные схемы магнитопроводов: последовательную, параллельную (дифференцированную) и мостовую.
2.5. Электромагниты переменного тока
Якорь ЭМ притягивается и в том случае, если на обмотку подаѐтся переменное напряжение. Учитывая, что магнитный поток в магнитопроводе будет синусоидальным и, использовав уравнение Максвелла определим:
,
где QТm – амплитуда тягового усилия, неизменного по знаку, но пульсирующего с удвоенной частотой.
Значит, в общем случае ЭМ постоянного тока при прочих равных условиях развивает большую силу притяжения, чем ЭМ переменного тока.
13
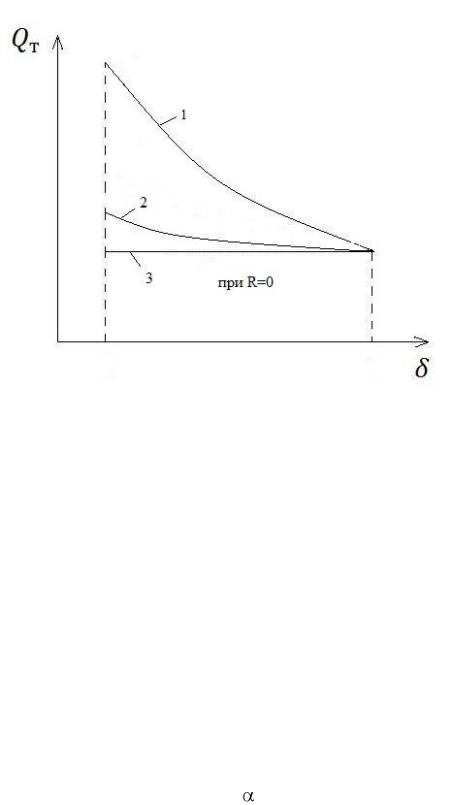
Вид тяговой характеристики ЭМ переменного тока определяется соотношением активного и индуктивного сопротивлений обмотки (рис. 5).
Рис.5
Так как зависимость тягового усилия от магнитного потока имеет синусоидальный характер, то в некоторые моменты времени тяговое усилие QТ обращается в 0. При наличии противодействующей силы Qмех., стремящейся оторвать якорь от сердечника и изменяющейся в соответствии с механической характеристикой ЭМ, может возникнуть вибрация якоря. При частоте переменного тока 50 Гц якорь совершает 100 колебаний в секунду, что нежелательно и приводит к повышенному износу при механическом взаимодействии якоря и сердечника, а также возникает шум.
Одно из эффективных средств против вибрации якоря – уменьшение пульсаций тягового усилия с помощью магнитных экранов (коротко замкнутых витков), охватывающих часть сечения магнитопровода (рис. 6).
Можно доказать, что создаваемые ими тяговые усилия QТа и QТв сдвинуты на некоторый угол 2 и значит обращаются в 0 неод-
14
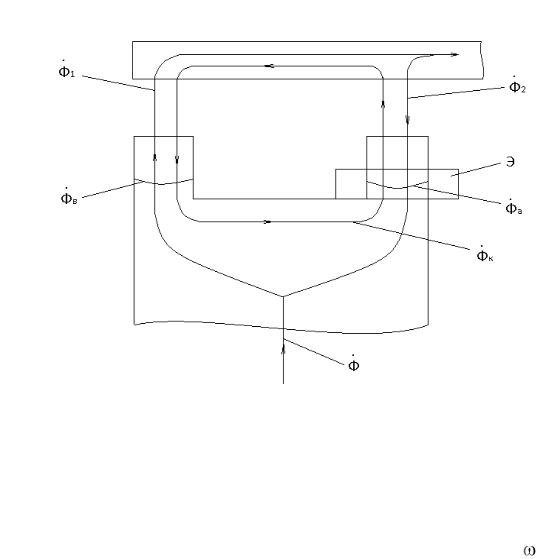
новременно, отсюда следует, что результирующее тяговое усилие QТ = QТа + QТв в любой момент времени не равно нулю.
Рис. 6
Для исключения вибрации якоря можно использовать 2-или 3-фазные ЭМ с токами в обмотках сдвинутыми по фазе по отношению друг к другу.
Если с якорем сочленены инерционные элементы (механизмы), то он утяжеляется, что предотвращает вибрацию с частотой 2 . Однако чувствительность ЭМ при этом снижается.
3. Электромагнитные муфты
Электромагнитные муфты осуществляют передачу вращающего момента с ведущего вала (вала приводного двигателя чаще всего) на соосный ведомый вал (вал приводимого механизма, механической нагрузки). Ниже (рис. 7) представлена их классификация.
15