Модули мобильной системы X90
Эффект искажения
Выборка входного сигнала осуществляется через равные промежутки времени. Если используемая скорость выборки слишком низкая, выборка будет проведена неправильно, и колебания будут описаны некорректно. Это нежелательное явление называется эффектом искажения.
Чтобы избежать появления таких ложных результатов, при выборке необходимо соблюдать требования теоремы Найквиста-Котельникова. Эта теорема о дискретизации описывает частотное соотношение между дискретизацией и сигналом и утверждает, что частота дискретизации должна быть вдвое выше максимальной частоты измеряемого сигнала.
Пример некорректной дискретизации
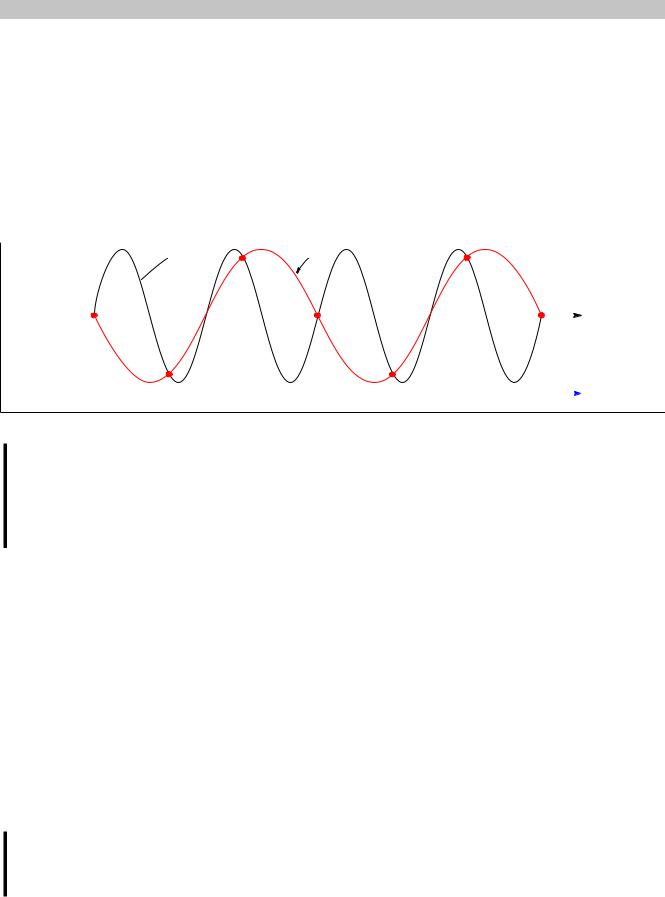
Синусоида с частотой 4 кГц, частота дискретизации 6 кГц. Красным цветом указана синусоида с частотой 2 кГц, появляющаяся из-за слишком низкой частоты дискретизации.
Амплитуда
Частота дискретизации 6 кГц
Рисунок 77: Некорректная дискретизация при частотах 6 кГц и 4 кГц
Информация:
Модуль гарантирует, что при дискретизации всегда выполняются требования теоремы Найкви- ста-Котельникова.
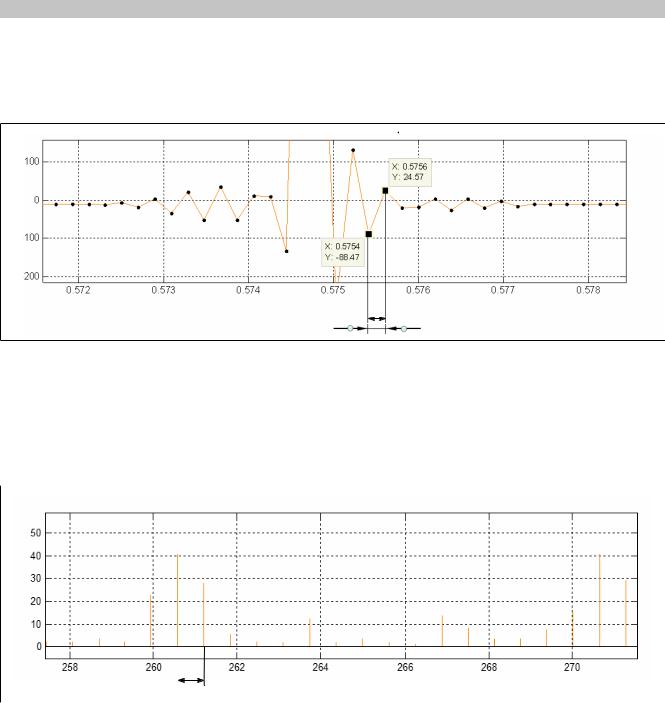
При оцифровке сигнала частотой 10 кГц используется уменьшенная частота дискретизации
25,7812 кГц!
Разрешение
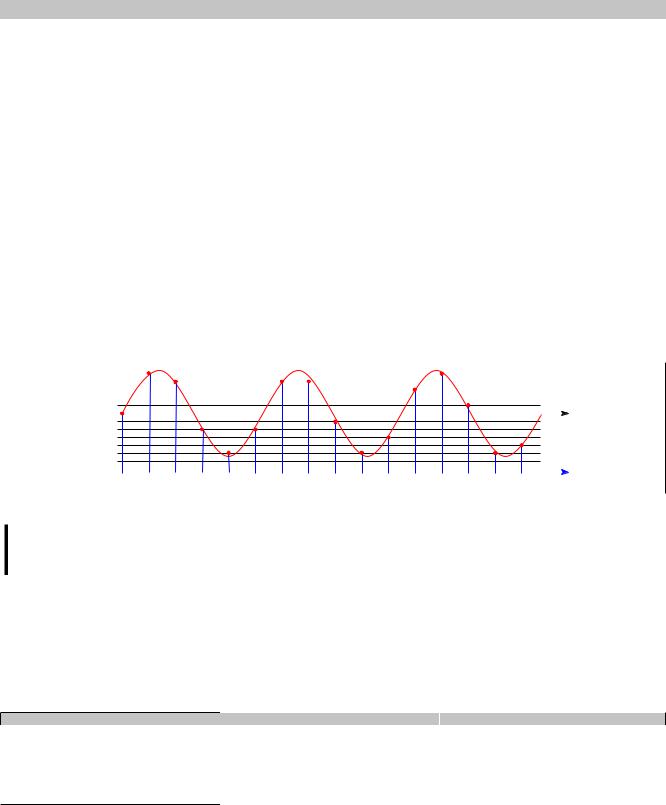
Непрерывный аналоговый входной сигнал преобразуется в серию дискретных значений. Максимальное количество дискретных значений в единицу времени определяется разрешением АЦП. Поскольку это количество всегда ограничено, оцифрованный сигнал всегда отличается от фактического входного сигнала. Это отклонение известно как ошибка квантования.
Интервал между двумя выборками определяется частотой дискретизации, поэтому при ее выборе следует принимать во внимание то, какая обработка потребуется для сигнала в дальнейшем. Для множества задач обработки сигналов принципиально важно придерживаться положений теоремы Найквиста-Котельникова. Посредством соответствующих процедур фильтрации и прореживания модуль гарантирует, что теорема Найквиста-Котельникова всегда выполняется, независимо от настроенной частоты опроса.
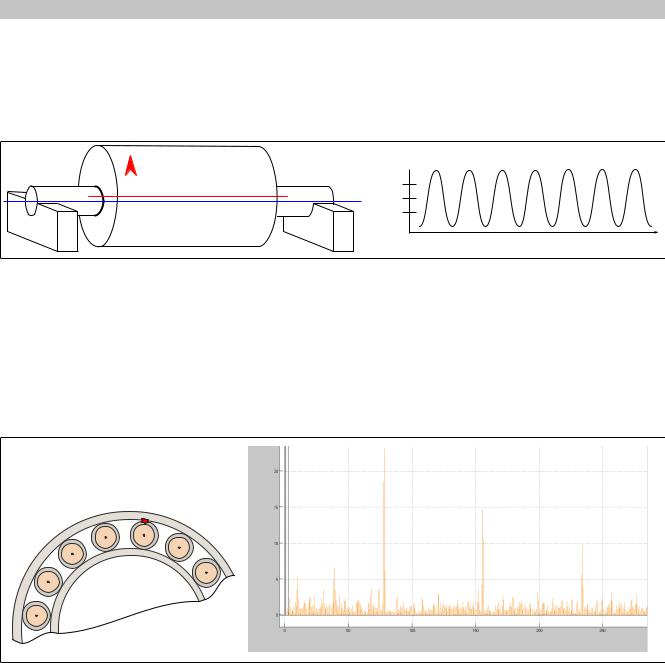
С точки зрения осциллограммы, более высокая частота дискретизации позволяет более точно описать сигнал, но при этом требует большего объема памяти. Что касается частотного спектра, то чем выше частота дискретизации, тем больше максимальная частота, которую можно зарегистрировать. С другой стороны, для FFT используется ограниченное количество значений, в результате чего уменьшается разрешение и вместе с ним возможность различить частоты, близкие друг к другу.
Информация:
При использовании модуля X90CM480 при максимальной частоте 200 Гц расстояние между двумя линиями спектра составит 0,0629 Гц.
256 |
Мобильная система управления X90 Руководство пользователя V 1.20 - Перевод руководства |