Материал: АСКВ2 БУ max90-ru_v1.20
Модули мобильной системы X90
5.4.1.5.10 Полосы частот
Для раннего обнаружения повреждений и проблем часто целесообразно отслеживать отдельные полосы частот. Для этих полос частот в качестве характеристического значения можно использовать подобранное среднеквадратичное значение.
Возможности:
•"Широкополосное среднеквадратичное значение" на странице 198
•"Зависимое от скорости среднеквадратичное значение" на странице 198
•"Шум" на странице 199
Можно задать до 32 различных полос частот. Важно отметить, что формат незначительно отличается в зависимости от конфигурации.
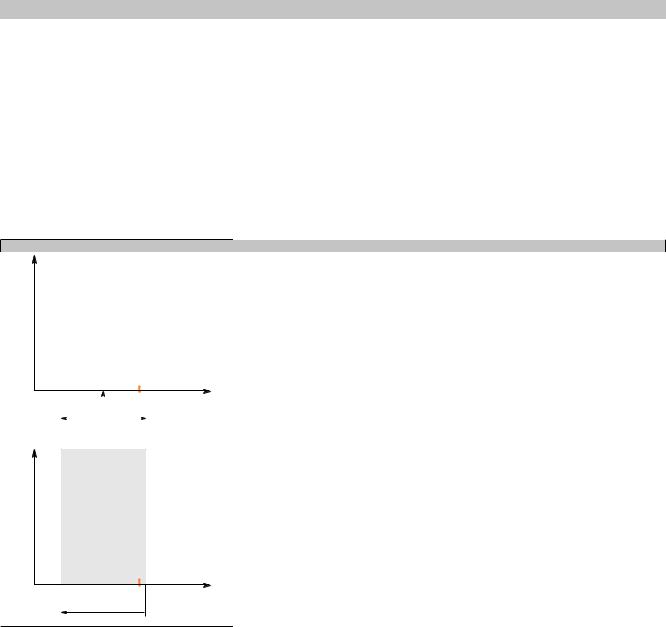
Зависимое от скорости среднеквадратичное значение
Амплитуда |
|
|
|
|
|
|
|
|
|
|
|
|
В формировании полосы частот участвует частота, соответствующая текущей скорости, ± интер- |
|
|
|
|
|
|
|
|
|
|
|
|
|
вал допусков. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
1) |
Частота, соответствующая текущей скорости: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
"FrequencyBandxxDmgFreq60Rpm" * "ActSpeed" |
|
|
|
|
|
|
|
|
|
|
|
|
|
2) |
Интервал допусков: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
"FrequencyBandTolerance" |
|
|
|
|
|
|
|
|
|
|
|
|
Частота |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 2) |
|
1) + 2) |
|
|
|
|
||||||
|
|
|
|
|
|
|||||||||
|
|
Полоса частот |
|
|
|
|
||||||||
|
|
|
|
|||||||||||
Независимое от скорости среднеквадратичное |
значение |
|
||||||||||||
Амплитуда
Частота
1) |
2) |
Полоса частот 
Полоса частот ограничена нижним и верхним пределами для полосы частот.
1)Нижний предел полосы частот: "FrequencyBandLowerFrequency"
2)Верхний предел полосы частот: "FrequencyBandUpperFrequency"
Ограничение диапазона частот позволяет легко выявить определенные неисправности.
Например, к ним относится дисбаланс. На его появление явно указывает рост амплитуды линии спектра, соответствующей скорости. Подбор соответствующего характеристического значения для частоты вращения может повысить эффективность оценки.
Также среднеквадратичные значения огибающей можно использовать для расчета других характеристических значений.
196 |
Мобильная система управления X90 Руководство пользователя V 1.20 - Перевод руководства |
Модули мобильной системы X90
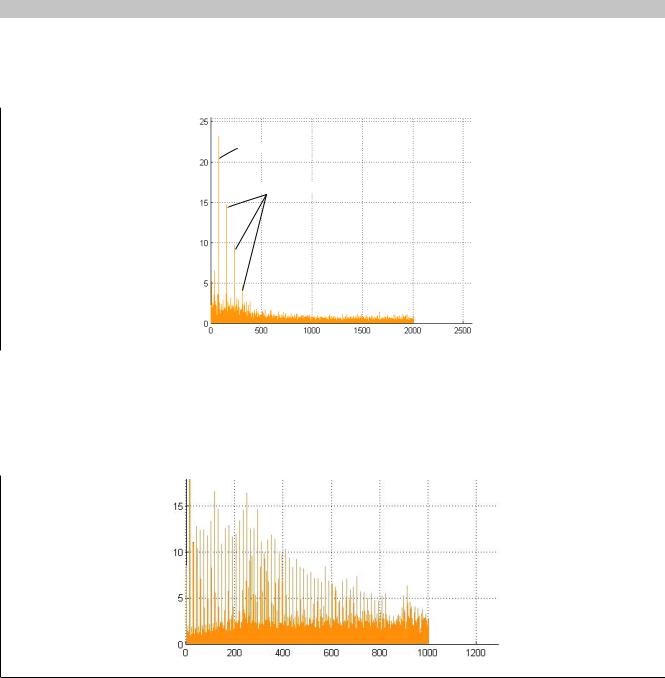
Повреждение внешней обоймы проявляется в виде изменения амплитуды частот, указывающих на повреждения подшипника. Обычно оно приводит к росту амплитуды линии, соответствующей частоте повреждения внешней обоймы.
Эту частоту можно, как правило, узнать у изготовителя.
Частота, указывающая на повреждение
Гармоники основного сигнала
Амплитуда [мg]
Частота [Гц]
Рисунок 40: Селективное характеристическое значение для обнаружения повреждения внешней обоймы
Настройка частотного диапазона характеристического значения в соответствии с частотой повреждений позволяет на ранней стадии выявлять повреждения внешнего кольца роликового подшипника.
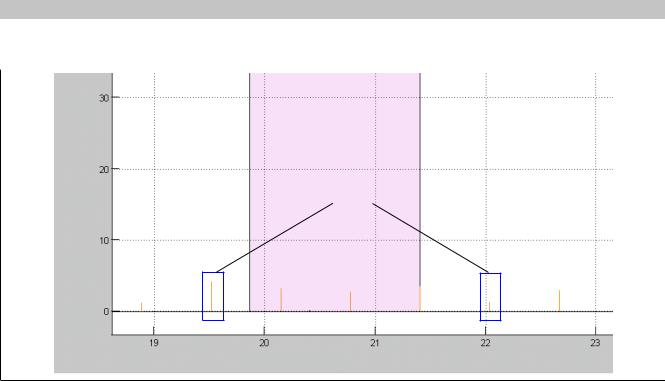
Если во входном сигнале присутствуют частоты за пределами диапазона, заданного минимальной и максимальной частотами сигнала для выбранного канала, то анализироваться будут только области между минимальной и максимальной частотами.
Амплитуда
MaxFrequenzyRaw |
|
Настроенная |
равна 1 кГц |
|
полоса частот |
Частота [Гц]
Рисунок 41: Ограничение полосы частот для анализа
Мобильная система управления X90 Руководство пользователя V 1.20 - Перевод руководства |
197 |
Модули мобильной системы X90
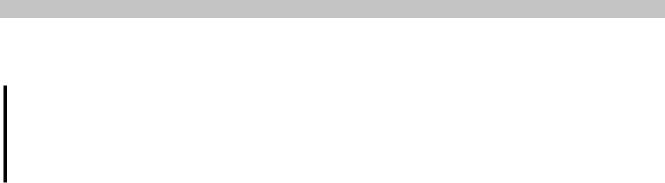
Две соседние линии (выборки) в спектре, которые находятся за пределами заданного окна (одна выше и одна ниже окна), будут частично включены в расчет, в зависимости от их удаленности от окна.
Амплитуда
Частичное включение в расчет
Частота [Гц]
Рисунок 42: Частичное включение в расчет прилежащих к пределам линий
5.4.1.5.10.1 Широкополосное среднеквадратичное значение
В этой конфигурации рассчитывается среднеквадратичное значение настроенного сигнала и канала для полосы частот. Значение рассчитывается в диапазоне от заданной минимальной частоты ("FrequencyBandXXLowerFrequency" на странице 203) до заданной максимальной частоты ("FrequencyBandXXUpperFrequency" на странице 204). Здесь можно задать минимальную и максимальную частоту с шагом 0,25 Гц.
Можно выбрать любой канал для любой полосы частот. На каждом канале можно выбрать следующие сигналы:
•Необработанный сигнал ускорения.
•Необработанный сигнал скорости. Значение равно 0, если расчет скорости отключен.
•Сигнал огибающей ускорения.
•Сигнал огибающей скорости. Значение равно 0, если расчет скорости отключен.
Врасчет также можно включить гармонические частоты (кратные целым числам), входящие в диапазон. При этом ширина полосы сохраняется, а средняя частота умножается на целое число (1, 2, 3 и т.д.), пока не будет превышена максимальная частота для данного сигнала и канала.
5.4.1.5.10.2 Зависимое от скорости среднеквадратичное значение
В этой конфигурации среднеквадратичное значение рассчитывается в переменной полосе частот. Для этого доступны 4 входа измерения скорости (см. регистр "ActSpeed" на странице 160). Для каждой из 32 полос частот можно выбрать одну из 4 скоростей. Кроме того, необходимо настроить нормализованную частоту повреждения при 60 об/мин (см. "FrequencyBandXXDmgFreq60rpm" на странице 203) и интервал допуска (см. "FrequencyBandXXTolerance" на странице 203). Их можно настроить отдельно для каждой полосы частот.
Окно, для которого рассчитывается среднеквадратичное значение, определяется следующим образом: Минимальная частота = (скорость * стандартизированная частота повреждения при 60 об/мин) - допуск Максимальная частота = (скорость * стандартизированная частота повреждения при 60 об/мин) + допуск Здесь можно ввести стандартизированную частоту повреждения и интервал допусков с шагом 0,01 Гц. На каждом канале можно выбрать следующие сигналы:
•Необработанный сигнал ускорения.
•Необработанный сигнал скорости. Значение равно 0, если расчет скорости отключен.
•Сигнал огибающей ускорения.
•Сигнал огибающей скорости. Значение равно 0, если расчет скорости отключен.
198 |
Мобильная система управления X90 Руководство пользователя V 1.20 - Перевод руководства |
Модули мобильной системы X90
В расчет также можно включить гармонические частоты (кратные целым числам), входящие в диапазон. Здесь ширина окна сохраняется, а центральная частота окна умножается на целое число (1, 2, 3 и т.д.), пока не будет достигнута максимальная частота, заданная для сигнала и канала.
Информация:
Если необходимо настроить фиксированную полосу частот, в которой шаг для установ-
ки минимальной (("FrequencyBandXXLowerFrequency" на странице 203) и максимальной ("FrequencyBandXXUpperFrequency" на странице 204) частот должен быть меньше 0,25 Гц, то следует использовать зависимую от скорости полосу частот с фиксированной скоростью.
5.4.1.5.10.3 Шум
В этой конфигурации рассчитывается шум диапазона соответствующего сигнала на выбранном канале в пределах заданной полосы частот.
Для этого настроенная максимальная частота (регистры "MaxFrequencyEnvelope" на странице 191 и "MaxFrequencyRaw" на странице 192) сигнала на выбранном канале делится на 4. В результате получается 4 диапазона. Затем конфигурацию можно использовать для выбора одного из 4 диапазонов, в котором необходимо выделить шум.
На каждом канале можно выбрать следующие сигналы:
•Необработанный сигнал ускорения.
•Необработанный сигнал скорости. Значение равно 0, если расчет скорости отключен.
•Сигнал огибающей ускорения.
•Сигнал огибающей скорости. Значение равно 0, если расчет скорости отключен.
Эта конфигурация позволяет, например, эффективно измерять проскальзывание. Чем выше трение, тем больше шума создается.
Мобильная система управления X90 Руководство пользователя V 1.20 - Перевод руководства |
199 |

Модули мобильной системы X90
5.4.1.5.10.4 Настройка
Для каждой из 32 полос частот можно выбрать одно из следующих характеристических значений.
Характеристическое значение |
Наименование |
FrequencyBandRmsAccEnvelope |
Среднеквадратичное значение формируется на основе огибающей сигнала виброускорения в свободно выбира- |
|
емом диапазоне частот. |
FrequencyBandRmsVelEnvelope |
Среднеквадратичное значение формируется на основе огибающей сигнала виброускорения в свободно выби- |
|
раемом диапазоне частот. Расчет диапазона частот производится, только если для соответствующего канала |
|
установлен бит EnableVelocityCalculation (настраивается в регистре "SensorConfig" на странице 162), в противном |
|
случае значение равно нулю. |
FrequencyBandRmsAccRaw |
Среднеквадратичное значение рассчитывается на основе необработанного сигнала виброускорения в свободно |
|
выбираемом диапазоне частот. |
FrequencyBandRmsVelRaw |
Среднеквадратичное значение рассчитывается на основе необработанного сигнала скорости колебаний в сво- |
|
бодно выбираемом диапазоне частот. |
FrequencyBandNoiseAccEnvelope |
Значение шума рассчитывается на основе необработанного сигнала виброускорения в свободно выбираемом |
|
диапазоне частот. |
FrequencyBandNoiseVelEnvelope |
Значение шума рассчитывается на основе необработанного сигнала виброускорения в свободно выбираемом |
|
диапазоне частот. Расчет диапазона частот производится, только если для соответствующего канала установ- |
|
лен бит EnableVelocityCalculation (настраивается в регистре "SensorConfig" на странице 162), в противном случае |
|
значение равно нулю. |
FrequencyBandNoiseAccRaw |
Значение шума рассчитывается на основе необработанного сигнала виброускорения в свободно выбираемом |
|
диапазоне частот. |
FrequencyBandNoiseVelRaw |
Значение шума рассчитывается на основе необработанного сигнала виброускорения в свободно выбираемом |
|
диапазоне частот. Расчет диапазона частот производится, только если для соответствующего канала установ- |
|
лен бит EnableVelocityCalculation (настраивается в регистре "SensorConfig" на странице 162), в противном случае |
|
значение равно нулю. |
Расчет общей ширины полосы частот
Измеренная частота повреждения может незначительно отличаться от ожидаемой частоты. Поэтому в целях компенсации этого отклонения необходимо удостовериться, что полоса частот достаточно широка, чтобы включить в себя частоту повреждения.
Было определено, что максимально допустимое отклонение составляет 1/2 % от максимальной частоты привода. Поскольку отклонение может возникнуть как в положительном, так и в отрицательном направлении, его следует учитывать дважды. Для расчета можно использовать следующую формулу:
Общая ширина полосы частот = 2 * 1/2 % * макс. частота привода [Гц]
В зависимости от выбранной максимальной частоты, для каждой полосы частот необходимо задать по меньшей мере три значения.
Первые гармоники, прилегающие слева и справа к границам настроенной полосы частот, включаются в расчет пропорционально их удаленности от полосы частот (см. рисунок в разделе "Полосы частот" на стра-
нице 196).
Пример
При максимальной частоте привода 50 Гц необходимо отслеживать полосу частот вокруг 10 Гц.
10 Гц ± (0,005 * 50 Гц) = Нижний предел полосы частот не выше 9,75 Гц, верхний предел не ниже 10,25 Гц
5.4.1.5.10.5 FrequencyBandMax
Имя:
От FrequencyBandMax01 до FrequencyBandMax32
Максимальное значение для соответствующей полосы частот, размерность 1/1000 мм/с или g, в зависимости от настроек. Дополнительную информацию см. в разделах "Характеристические значения (минимальные и максимальные)" на странице 183 и "Полосы частот" на странице 159.
Если настройка диапазона частот соответствует сигналу скорости, это значение рассчитывается только при установке для соответствующего канала бита EnableVelocityCalculation (настраивается в регистре "SensorConfig" на странице 162), в противном случае значение регистра равно 0.
Тип данных |
Значения |
UDINT |
0–4 294 967 295 |
5.4.1.5.10.6 FrequencyBandMin
Имя:
От FrequencyBandMin01 до FrequencyBandMin32
Минимальное значение для соответствующей полосы частот, размерность 1/1000 мм/с или g, в зависимости от настроек. Дополнительную информацию см. в разделах "Характеристические значения (минимальные и максимальные)" на странице 183 и "Полосы частот" на странице 159.
200 |
Мобильная система управления X90 Руководство пользователя V 1.20 - Перевод руководства |