Материал: Sb98338
бораторной работе № 2 статическим режимам (u 1 , x 1 ) и т. д. Построить графики переходных процессов.
5. Проверить соответствие графиков х(t) и х(t), u t и u(t) ,y t и y(t) по соотношениям (4.4).
6. Оценить устойчивость системы по собственным числам матрицы А.
Рекомендации по программированию
Понадобится следующая функция языка MATLAB реализующая решение СЛДУ численным методом:
[y, x] = lmsim(a, b, c, d, t, x0, u) ;
где а, b, с, d – матрицы А, В, С, D соответственно; t – вектор-строка моментов времени, для которых рассчитывают значения х(t) и u(t); x0 – вектор начальных условий; u – матрица, столбцы которой есть значения вектора входа u в моменты времени, заданные в векторе-строке t. Эта функция предназначена только для линейных систем, представленных в виде (4.2).
Ниже приведен фрагмент программы, позволяющей рассчитать графики
х(t) и u t :
%формирование набора значений моментов времени t = 0.0:0.01:1.0; % набор значений t из [0 с, 1 с]
%с шагом 0.01 с
%формирование значений вектора u(t), t из [0 с, 1 с] u =[u1_*ones (t); % строка из значений u1_
u2_*ones (t); % строка из значений u2_ u3_*ones (t); % строка из значений u3_
%задание начальных значений вектора x
x0 = [0; 0; 0]; % при нормированных переменных это % соответствует номинальному режиму
[y, x] = lsim(a, b, c, d, t, x0, u) ;
Расчет коэффициентов характеристического полинома матрицы А и его корней, а также вывод графика расположения корней на комплексной плоскости можно осуществить следующим образом:
р = роlу (а); lmd = гооts (p);
plot (real (lmd), imag (lmd), ‘*’), grid, pause
21
Содержание отчета
1.Формулировка цели работы.
2.Аналитические выражения для уравнений (4.1) и матриц системы (4.2) относительно нормированных переменных (без подстановки значений параметров), а также все промежуточные выкладки.
3.Матрицы системы (4.2) после подстановки численных значений параметров объекта.
4.Программа на языке MATLAB.
5.Графики переходных процессов. Для каждого переходного процесса указать статический режим, из которого процесс начался, а также статический режим, которым переходный процесс окончился. Сравнить, согласуются ли переходные процессы с результатами лабораторной работы № 2.
6.Оценка степени соответствия переходных процессов.
7.Коэффициенты характеристического полинома матрицы А и график расположения корней полинома на комплексной плоскости.
8.Выводы.
22
ЛАБОРАТОРНАЯ РАБОТА № 5
РАСЧЕТ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ И ЧАСТОТНЫХ ХАРАКТЕРИСТИК ДИНАМИЧЕСКОЙ СИСТЕМЫ
Цель работы: определить ПФ линеаризованной модели от каждого входа к каждой переменной состояния при условии, что в начальный момент времени система находится в состоянии равновесия; исследовать переходные процессы и частотные характеристики линейной системы.
Постановка задачи
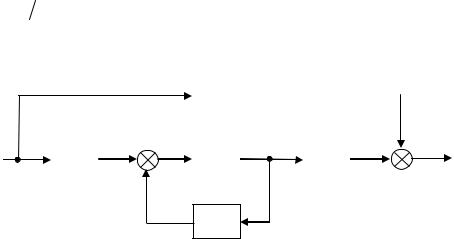
Для объекта (4.2) (при нулевых начальных условиях) матричная ПФ от векторного входа u к векторному выходу y:
W (s) C sI A 1В+ D
представляет собой матрицу строения m l . Ее элементами являются дробнорациональные функции комплексной переменной – скалярные передаточные
функции W |
|
u |
s , от компонент вектора u к компонентам вектора y. |
|||||||
y |
j |
|
|
|
|
|
|
|
||
|
|
i |
|
|
|
|
|
|
|
|
Матричная ПФ W (s) соответствует схеме на рис. 5.1. |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
D |
|
|
|
y |
|
|
|
|
|
x |
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
B |
|
1/s |
C |
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
A
Рис. 5.1
ПФ позволяют, в частности, рассчитывать частотные характеристики объекта и анализировать реакцию объекта на типовые воздействия.
В этой работе основной задачей является расчет матричной ПФ объекта (4.2) и расчет частотных характеристик по всем скалярным ПФ. Также рассматривают переходные характеристики, т. е. реакцию системы на единичное ступенчатое воздействие. Реакция системы на другие воздействия не рассматривается. Последовательность расчета следующая:
23
1)считать вектор выхода равным вектору состояния и сформировать матрицу С как единичную матрицу строения n n . Матрицу D сформировать нулевой строения n l ;
2)рассчитать W(s) и выбрать из нее i-й столбец, т. е. скалярные ПФ
W y1 ui s , ,W yn
ui s , ,W yn  ui s ;
ui s ;
3) рассчитать x j (t) , j = 1,..., n как результаты прохождения входного сигнала ui (t) через соответствующие скалярные ПФ.
Поскольку сигнал ui (t) представляет собой ступенчатое воздействие, то x j (t) подобна переходной характеристике соответствующей ПФ, т. е. реакции
на единичное ступенчатое воздействие. Отличие состоит только в постоянном множителе, так как скачок ui (t) не равен единице в общем случае.
Очевидно, что для исследования только x(t) матрицу С выбрали единичной. Когда вектор выхода другой, то следует корректно сформировать другие матрицы С и D.
Содержание работы
1. Рассчитать коэффициенты ПФ W y j ui s от каждого входа к каж-
дому выходу.
2.Рассчитать АЧХ и ФЧХ для каждой скалярной ПФ.
3.Выбрать из лабораторных работ № 2 и 4 переходные процессы, в которых конечный статический режим отличается от начального изменением только одной компоненты вектора входов ui (или ui ), i = 1,... , l. Проверить по графи-
кам АЧХ от каждого входа, что коэффициенты передачи к каждому выходу (значение АЧХ в нуле) равны коэффициентам передачи для линейной системы (т. е. отношениям y

 u на момент окончания переходных процессов).
u на момент окончания переходных процессов).
4. Для тех же случаев построить переходные характеристики для каждой выходной координаты. Убедиться, что переходный процесс соответствует по форме переходному процессу, рассчитанному в лабораторной работе № 4.
Рекомендации по программированию
Необходимо использовать функции библиотеки LTI языка MATLAB, в которой линейные динамические системы описываются в виде LTI-объекта: sys = ss(A,B,C,D) – формирование LTI-модели в пространстве состояния; sys = tf(num,den) – формирование LTI-модели в пространстве передаточных функций, num, den – соответственно полиномы числителя и знаменателя.
24

Примечание: функции ss и tf также служат для преобразования LTIмоделей из одной формы описания в другую, для этого модель нужно указать единственным аргументом.
bode(sys) – расчет и построение логарифмических частотных характеристик (диаграмм Боде);
stер(sys) – расчет и построение переходной характеристики.
Более подробную информацию об указанных функциях библиотеки LTI можно узнать, набрав в командной строке help имя_функции.
Содержание отчета
1.Формулировка цели работы.
2.Значения коэффициентов всех скалярных ПФ из матричной ПФ
W y j ui s . Значения корней знаменателя этих ПФ. Значения корней чис-
лителей этих ПФ.
3.Графики АЧХ и ФЧХ для каждой ПФ.
4.Графики переходных характеристик.
5.Тексты написанных и использованных программ.
6.Характеристика результатов и выводы.
25