Материал: Sb98338
4. Оператор цикла типа while выполняется до тех пор, пока выполняется условие, указанное в заголовке:
while условие операторы
end
Если есть необходимость в досрочном прерывании выполнения цикла, используется оператор break.
Скрипты и функции пользователя. Все m-файлы, содержащие исходные коды на языке MATLAB, делятся на два типа: файлы-сценарии и файлыфункции.
Файлы-сценарии (или script-файлы) являются просто записью серии команд, которые могли бы быть набраны и выполнены в командном окне MATLAB. Главная их особенность состоит в том, что файлы-сценарии не имеют входных и выходных параметров. В них используются переменные из общего рабочего пространства MATLAB. В процессе выполнения они не компилируются в двоичный код. Обычно файл-сценарий имеет следующую структуру:
%Основной комментарий
%Дополнительный комментарий
Тело скрипта, состоящее из любой совокупности операторов.
Основным комментарием является первая строка текстовых комментариев, а дополнительным – последующие строки. Основной комментарий выводится при выполнении команд lookfor и «help имя_каталога». Полный комментарий выводится при выполнении команды «help имя_файла».
М-файл типа «функция» является типичным элементом языка программирования MATLAB. Файлы-функции обязательно начинаются с объявления function, после которого указывается имя переменой (или имена нескольких переменных) – выходного параметра, имя самой функции и список ее входных параметров.
Все переменные, используемые в теле файла-функции, являются локальными, т. е. действуют только в пределах тела функции. При этом переменные общего рабочего пространства внутри функции не видны.
Структура файла-функции с одним выходным параметром выглядит следующим образом:
function var=f_name(список_параметров) заголовок % Основной комментарий
36
% Дополнительный комментарий Тело функции, состоящее из любой совокупности операторов var=выражение
Замечание 1: оператор var=выражение (и сама переменная var) используются в тех случаях, когда требуется, чтобы функция возвращала некоторый результат.
Замечание 2: Если выходных параметров больше одного, то необходимо использовать конструкцию типа: function [var1, var2, …]=f_name(список_па-
раметров). Если функция, имеющая несколько выходных параметров, входит в состав математического выражения, то для выполнения вычислений в выражении будет использоваться первый из выходных параметров. Как уже было сказано, в файлах-функциях используются локальные переменные. Но наряду с ними нередко возникает необходимость в использовании данных, находящихся в рабочем пространстве MATLAB, или передача данных из одной функции в другую не через выходные параметры. В этих случаях используется понятие глобальных переменных, описываемых командой
global var1 var2 …;
Здесь переменные var1 и var2 определены как глобальные. Чтобы несколько программных модулей могли совместно использовать глобальную переменную, ее идентификатор должен быть объявлен как global во всех этих модулях. Если в функции должны использоваться общие переменные, их необходимо также объявить глобальными в функции.
Основы моделирования динамических систем в среде SIMULINK
Как было отмечено выше, система SIMULINK предназначена для имитационного моделирования динамических систем. Процессы формирования моделей и моделирования носят интерактивный характер, т. е. пользователь может «на ходу» менять параметры модели и наблюдать за реакцией. Из SIMULINK имеется доступ ко всем средствам анализа пакета MATLAB. Эта возможность в совокупности с библиотекой блоков и возможностью создания своих библиотек делает SIMULINK одним из наиболее популярных средств моделирования динамических объектов.
В качестве иллюстративного примера на рис. П2 изображены модель и результаты моделирования изменения синусоидального сигнала при прохождении через интегратор.
37
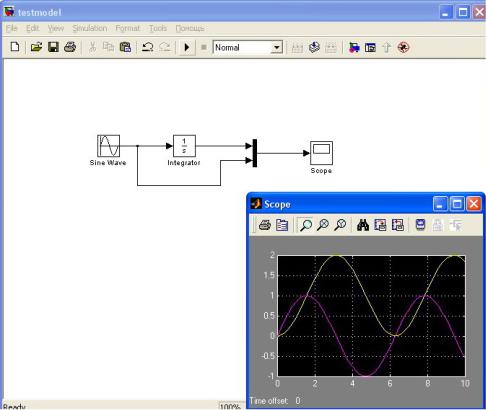
Рис. П2
Библиотека блоков SIMULINK представляет собой набор визуальных объектов, используя которые можно собирать произвольную конструкцию. Блоки легко можно копировать и настраивать индивидуально (как правило, двойным нажатием мыши на изображение блока). Для удобства работы пользователя библиотека разбита на семь неизменяемых разделов:
–Sources (источники сигналов);
–Sinks (получатели сигналов);
–Discrete (блоки моделирования дискретных систем);
–Continuous (блоки моделирования линейных систем);
–Discontinuous (блоки моделирования нелинейных систем);
–Math Operations (блоки математических операций);
–Signal Routing (блоки коммутации сигналов).
Также в состав SIMULINK входит множество специализированных библиотек блоков, предназначенных для конкретных инженерных задач.
Ниже в табл. П1 приведены блоки, наиболее часто используемые для моделирования динамических систем. Соединительные связи строятся при помощи мыши.
38

|
|
|
Таблица П1 |
|
|
|
|
Блок |
Изображение |
Библиотека |
Настраиваемые |
|
|
|
параметры |
|
|
|
Время включения; |
Ступенчатое воздействие |
|
Sources |
высота |
|
|
|
«ступеньки» |
Гармоническое воздействие |
|
Sources |
Амплитуда, фаза, |
|
частота |
||
|
|
|
|
|
|
|
|
Окно для временных диаграмм |
|
Sinks |
Масштаб, |
|
автомасштаб |
||
|
|
|
|
|
|
|
|
Интегратор |
|
Continuous |
Начальное условие |
|
|
|
|
Усилитель |
|
Math |
Коэффициент |
(пропорциональное звено) |
|
operations |
усиления |
|
|
|
|
Сумматор (вычитатель) |
|
Math |
Количество входов, |
|
operations |
знаки входов |
|
|
|
||
|
|
|
|
Мультиплексор |
|
Signal |
Количество входов |
|
Routing |
||
|
|
|
|
Старт имитационного моделирования осуществляется через меню simulation, либо через соответствующую дублирующую пиктограмму. Также меню simulation позволяет задавать общие параметры моделирования, такие как время, шаг, метод интегрирования и пр.
2. ВАРИАНТЫ ЗАДАНИЙ
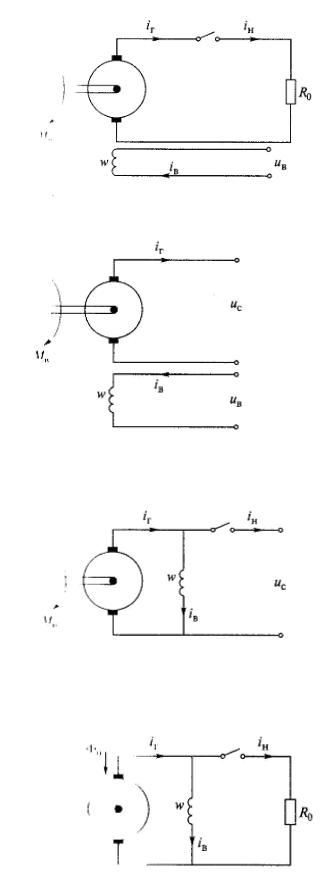
Ниже в таблицах и на рисунках приведены исходные данные по электрическим машинам для семи вариантов.
|
Таблица П1 |
|
|
Номер варианта |
Тип ЭМ |
1 |
ГПТ НВ, работающий на активную нагрузку |
2 |
ГПТ НВ, работающий на сеть большой мощности |
3 |
ГПТ ПрВ, работающий на сеть большой мощности |
4 |
ГПТ СВ, работающий на активную нагрузку |
5 |
ДПТ НВ, управляемый со стороны коллектора |
6 |
ДПТ НВ, управляемый со стороны ОВ |
|
|
7 |
ДПТ ПВ |
39
|
F iвw, |
F , |
|
|
||||||||||||
|
U |
в |
i r |
w |
d |
, |
|
|
|
|||||||
|
|
|
|
|
||||||||||||
|
|
|
в в |
|
|
dt |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
diг |
|
|
|
|||
1) |
c |
|
i r |
L |
|
|
i R |
, |
||||||||
|
|
dt |
||||||||||||||
e |
|
|
г я |
|
|
я |
|
|
г 0 |
|
||||||
|
J |
d |
M |
в |
c i .; |
|
|
|||||||||
|
|
|
|
|||||||||||||
|
|
|
|
dt |
|
|
м |
|
|
г |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
F iвw, |
F , |
|
|||||||||||||
|
U |
в |
i r |
w |
d |
, |
|
|
||||||||
|
|
|
|
|||||||||||||
|
|
|
|
|
в в |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ce iгrя Lя diг Uc , 2) dt
J d Mв cм iг.; dt
|
F iвw, |
|
|
F , |
|
|
|
|||||||||||||||
|
U |
с |
i r |
|
w |
d |
, |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
в в |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
diг |
|
|
|
|
|||||
3) |
c |
i r |
L |
|
|
U |
c |
, |
|
|||||||||||||
|
|
|
|
|
|
|||||||||||||||||
|
e |
|
|
г я |
|
|
я |
|
|
|
dt |
|
|
|
|
|||||||
|
J d M |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
в |
c i .; |
|
|
|
|
|
|||||||||||||||
|
|
|
dt |
|
|
|
|
м |
|
|
|
г |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
F iвw, |
|
0 F , |
|
|
|||||||||||||||||
|
i |
R |
|
|
i r |
|
|
w |
d |
, |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
н |
|
0 |
|
в в |
|
|
|
|
dt |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
4) |
ce iгrя Lя |
diг |
iнR0 |
, |
||||||||||||||||||
|
dt |
|
||||||||||||||||||||
|
J |
d |
M |
в |
c i .; |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
dt |
|
|
|
|
|
м |
|
|
г |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40