Материал: Sb97588
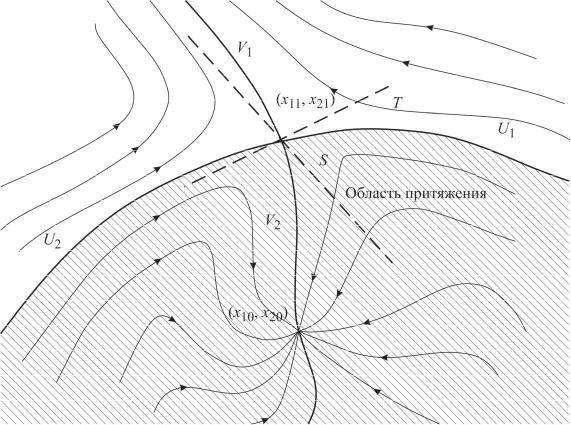
Усы U1, U2, V1, V2 седловых точек имеют особое значение при определе-
нии областей притяжения. Они являются теми кривыми, которые разделяют фазовый портрет системы на области с различными фазовыми траекториями. Такие кривые называют сепаратрисами. Устойчивые усы U1, U2 седла
x11, x21 разделяют всю фазовую плоскость на области устойчивых и неустойчивых движений и служат границей области притяжения. На рис. 3.1 штриховкой показана область притяжения устойчивого узла x10, x20 , ограниченная устойчивыми усами U1, U2 седла x11, x21 .
В нелинейных системах могут также существовать предельные циклы – изолированные замкнутые кривые на фазовой плоскости, такие, что всякая траектория, соседняя с предельным циклом, уже не является замкнутой. Предельные циклы соответствуют незатухающим периодическим движениям в нелинейных системах.
Рис. 3.1
Точки равновесия, предельные циклы и сепаратрисы называют особыми траекториями. Особых траекторий обычно имеется конечное число, они разбивают все фазовые пространства на ряд областей, характер движения в каждой из которых нетрудно определить, зная характеры устойчивости точек
16

равновесия и предельных циклов. Определив все особые траектории, можно получить полную качественную характеристику всех возможных типов движения системы, определить области притяжения устойчивых состояний равновесия и по этим данным построить фазовый портрет системы.
В том случае, когда постоянные возмущения f1, f2 в математической мо-
дели УО отличны от нуля, устойчивость объекта ухудшается. На фазовой плоскости ухудшение устойчивости сопровождается уменьшением области притяжения устойчивых точек равновесия. Таким образом, метод фазовых траекторий дает наглядное представление об изменении устойчивости системы при наличии внешних возмущений и, в частности, позволяет решить задачу определения постоянных возмущений, при которых УО становится неустойчивым.
3.3. Оценка эффективности средств управления УО
Рассмотрим уравнения движения УО (3.1), дополненные постоянными управляющими воздействиями U1,U2 :
dx1 = F |
(x , x |
) + f |
|
+U , |
|
|||||||
dt |
1 |
|
1 |
2 |
|
1 |
|
1 |
|
|
||
dx |
|
|
(x , x |
|
) + f |
|
|
+U |
|
. |
||
|
2 = F |
|
|
2 |
2 |
|||||||
|
dt |
2 |
1 |
2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Предположим, что возмущения f1, f2 есть функции одного возмущения, а управляющие воздействия U1, U2 – функции одного управления. Тогда в
рамках задачи оценки эффективности управления рассматривается возможность компенсации постоянного возмущения таким образом, чтобы УО имел как минимум одну устойчивую точку равновесия.
Если диапазон изменения U1, U2 неограничен, то при любом возмущении можно обеспечить устойчивое движение объекта. В реальных физических объектах всегда присутствуют ограничения возмущающих и управляющих воздействий и параметров движения УО, а также могут быть дополнительные условия в виде ограничений равенства [4]:
fi ≤ fimax , Ui ≤Uimax , xi ≤ ximax , xi = xi, i =1,2,
где fimax , Uimax зависят от особенностей физической среды, в которой движется объект, и конструктивного исполнения средств управления УО, соответственно; ximax определяется прочностными характеристиками УО; xi – некоторое фиксированное значение параметра.
17
Первая задача оценки эффективности состоит в определении воздействий U1,U2 при заданных значениях постоянных внешних возмущений f1, f2 . Вторая задача оценки эффективности состоит в определении максимальных (критических) значений внешних возмущений, которые могут быть скомпенсированы управляющими воздействиями с учетом ограничений. Иногда, в зависимости от УО, задачи оценки эффективности средств управления можно решить аналитически.
3.4. Анализ нелинейной модели движения СВП
Рассматривая систему уравнений (2.2), описывающих движение СВП, можно записать следующую систему для определения установившихся режимов при отсутствии внешних возмущений:
a |
22 |
ω+ F [β]= 0; |
|
|
|
(3.6) |
|
ω(t)+ a β(t) = 0, |
|||
|
|
33 |
|
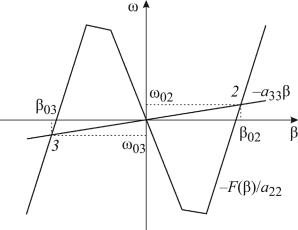
откуда
ω= −F (β) a22 = −a33β.
a22 = −a33β.
Всоответствии с видом кривой F (β) условие (3.6) выполняется при
ω01 = 0, β01 = 0, а также ω02,β02 |
и ω03,β03, значения которых могут быть |
|||||||
|
|
|
получены с |
помощью графического |
||||
|
|
|
построения (рис. 3.2). Однако точкой |
|||||
|
|
|
балансировочного режима может счи- |
|||||
|
|
|
таться только |
начало |
координат |
|||
|
|
|
(ω01 = 0, β01 = 0), |
так как точки 2 и 3 |
||||
|
|
|
соответствуют режимам |
циркуляции |
||||
|
|
|
СВП с угловыми скоростями ω02 и |
|||||
|
|
|
ω03 соответственно. |
|
||||
Рис. 3.2 |
|
|
|
Линеаризованная модель рыска- |
||||
|
|
нья СВП имеет вид |
|
|||||
d∆ω = a |
∆ω+ a |
∆β+ c ∆v |
w |
, |
|
|
||
|
dt |
22 |
23 |
21 |
|
|
(3.7) |
|
|
|
|
|
|
|
|
||
d∆β |
= a32∆ω+ a33∆β+ c31∆vw, |
|
|
|||||
|
dt |
|
|
|||||
|
|
|
|
|
|
|
|
|
18

где ∆ω= ω−ω |
, |
∆β =β−β |
|
, |
∆v |
|
= v |
|
−v |
|
, |
a |
|
= ∂F |
β =β0i |
, i =1,2,3, |
0i |
|
|
0i |
|
|
w |
|
w |
|
wi |
|
|
23 |
∂β |
|
a32 =1. Исследовав линеаризованную модель (3.7) в окрестности точек 1–3, можно убедиться, что точка (ω01, β01) является точкой устойчивого равновесия типа «фокус», а (ω02, β02 ), (ω03, β03 ) – точками равновесия типа
«седло». Фазовый портрет СВП дает наглядное представление об областях устойчивого и неустойчивого движения, в том числе и при наличии постоянных внешних возмущений.
Последняя задача – оценка эффективности руля СВП – может быть решена численным или аналитическим способом. Уравнения для определения
балансировочного режима |
|
в |
|
|
общем |
случае |
получаются из |
(2.2) при |
|||||||||
ϕ(t)≡ 0, |
|
|
0, mw (t)≡ |
0, fw (t)≡ 0 и имеют вид |
|
||||||||||||
ω(t)≡ 0,β≡ 0,U (t)≡ |
|
||||||||||||||||
|
F |
( |
β |
) |
+b δ+ c v |
w |
= 0, |
|
|
|
|||||||
|
|
|
|
|
21 |
21 |
|
|
|
|
|
(3.8) |
|||||
|
|
|
|
β+b |
δ+ c v |
|
|
= 0. |
|
|
|||||||
|
a |
|
w |
|
|
|
|||||||||||
|
|
33 |
|
|
31 |
31 |
|
|
|
|
|
|
|||||
Решение уравнений (3.8) может быть выполнено графически по анало- |
|||||||||||||||||
гии с решением уравнений (3.6) на основе соотношения |
|
|
|
||||||||||||||
|
δ = − F (β)+ c |
|
V |
|
|
b |
= −(a β+ c V |
) |
b . |
(3.9) |
|||||||
|
|
21 |
W |
21 |
|
|
33 |
31 W |
|
31 |
|
||||||
Соотношение (3.13) позволяет определить угол перекладки руля, компенсирующий заданное внешнее возмущение. Максимальный угол перекладки руля СВП составляет 35°. Кроме того, для СВП недопустимо движение с большими углами дрейфа, поскольку это может привести к аварийной ситуации. Граничное значение угла дрейфа составляет 30°. Данные ограничения позволяют сделать окончательный вывод о возможности компенсации внешнего возмущения.
Аналогично, систему (3.8) можно решить относительно внешнего возмущения vw :
v |
w |
= − F (β)+b δ |
c |
= −(a β+b δ) |
c . |
|
(3.10) |
||
|
|
21 |
21 |
33 |
31 |
31 |
|
|
|
Подставив в (3.10) предельное значение угла перекладки руля, можно |
|||||||||
определить критическое значение постоянного возмущения |
vw |
, которое |
|||||||
|
|
|
|
|
|
|
|
кр |
|
может быть скомпенсировано. В этом случае также необходимо учитывать ограничение угла дрейфа.
19
4. ИССЛЕДОВАНИЕ ОПТИМАЛЬНОГО ЗАКОНА СТАБИЛИЗАЦИИ БОКОВОГО ОТКЛОНЕНИЯ СВП
4.1. Основные положения теории синтеза
Задача синтеза оптимальной непрерывной системы стабилизации в детерминированной постановке заключается в определении оптимального управления, минимизирующего интегральный квадратичный критерий качества:
J = ∞∫(xт(t)Λxx(t)+ xтCтΛyCx +uтΛuu)dt , |
(4.1) |
0 |
|
где x(t) Rn – вектор состояния; y (t) Rr – вектор выхода; u(t) Rm – вектор управления; Λx ≥ 0, Λy ≥ 0, Λu 0 – весовые матрицы, на уравнениях линейного объекта управления вида
x = Ax(t)+ Bu(t);
y (t) =Cx(t), |
(4.2) |
||
|
|||
гдеA, B, C – матрицы состояния, управления и выхода соответственно. |
|
||
Известно [3], что решением задачи оптимального управления для объек- |
|||
та управления (4.2) и критерия качества (3.1) является управление вида |
|
||
u* (t) = −Kx(t); |
(4.3) |
||
K = Λu−1Bт |
|
. |
|
P |
|
||
Здесь K – матрица обратной связи; P – матрица, представляющая решение матричного алгебраического уравнения Риккати вида
AтP + PA − PSP +Q = 0, |
(4.4) |
где S = BтΛu−1B , Q = Λx +CтΛyC =C1тC1, P = Pт.
Матрица P > 0 – единственное положительно определенное решение алгебраического уравнения (4.4), а оптимальный закон управления (4.3) асимптотически устойчив тогда и только тогда, когда пара матриц (A, B) управляема
или стабилизируема, а пара матриц (A,C1) наблюдаема или обнаруживаема.
Заметим, что свойства стабилизируемости и обнаруживаемости более слабые, чем свойства управляемости и наблюдаемости (восстанавливаемости) [5].
На практике для получения матрицы P используется несколько методов. В частности, применяются методы численного решения нелинейного
20