Материал: Sb97588
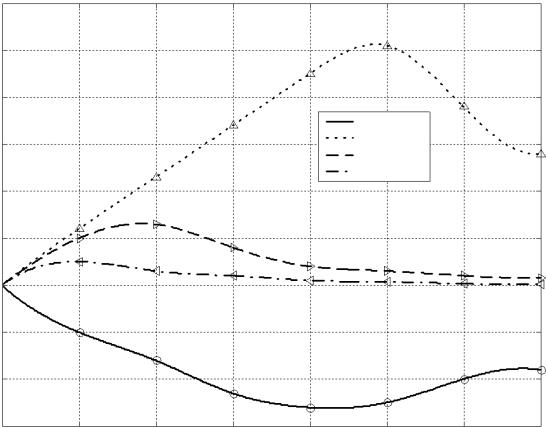
жет быть нарушено, что приведет к самопроизвольному развороту. Таким образом, ходовой дифферент является основным фактором, влияющим как на значение буксировочного сопротивления амфибийных СВП, так и на их устойчивость на курсе.
–my(β)
0.06
0.05
0.04
– Fr = 0.45;
0.03 – Fr = 0.95;
– Fr = 1.4;
– Fr = 1.85
0.02
0.01
0
–0.01
–0.02
–0.03
0 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
|
|
|
|
|
|
|
β, …° |
Рис. 1.2
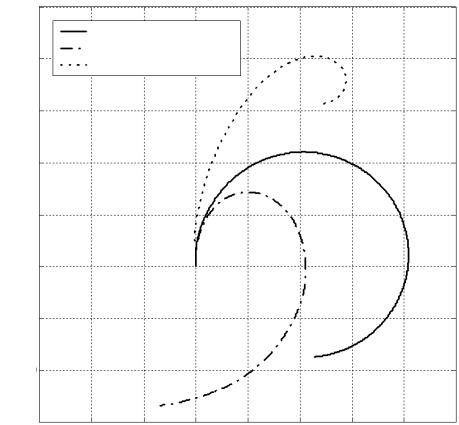
Управляемость СВП значительно меняется при действии ветра. На рис. 1.3 приведены циркуляции амфибийного СВП при действии ветра. Как видно из рисунка, действие ветра существенно меняет циркуляцию судна, которая значительно зависит от направления ветра относительно курса судна.
Особенность движения СВП на волнении – увеличение вероятности замыва гибкого ограждения с последующим его подломом и опрокидыванием судна. По сравнению с водоизмещающими судами СВП обладает преимуществами, особенно на больших скоростях, вследствие стабилизирующего действия воздушной подушки (влияния сжимаемости воздуха) на вертикальную качку. В частности, уровень вертикальных перегрузок у амфибийных СВП в 2–4 раза меньше, чем у сопоставимых по массе водоизмещающих судов [2].
6
Хg
2500
2000
1500
1000
500
0
–500
–1000
–1500
–без ветра;
–ветер 7 м/с, курс 0°;
–ветер 7 м/с, курс 90°
–1000 |
|
–500 |
|
0 |
|
500 |
|
1000 |
|
1500 |
|
2000 |
|
2500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Zg |
Рис. 1.3
Подводя итог изложенному, нужно отметить следующие основные особенности СВП как объекта управления по сравнению с водоизмещающими судами:
–гидродинамические и аэродинамические силы, действующие на эти суда, соизмеримы по величине;
–СВП является проницаемым телом, при движении судно захватывает и вовлекает в движение большие объемы воздуха, что приводит к появлению специфических для СВП импульсных сил, значения которых сопоставимы с аэродинамическим сопротивлением;
–существенная зависимость (обычно нелинейная) гидродинамических и аэродинамических характеристик, в первую очередь гидродинамических, от параметров движения судна, таких как углы дрейфа, крена, дифферента и скорость хода, где скорость хода и угол дрейфа – факторы, наиболее существенно влияющие на изменение этих характеристик;
–большие радиусы циркуляции, выбеги и т. д., требующие большего пространства для разворота по сравнению с водоизмещающими судами;
7
– существенно бóльший по сравнению с водоизмещающими судами диапазон изменения угла дрейфа на больших скоростях хода. Так, угол дрейфа может доходить до 30° при скоростях 40…50 уз. Особенно это явление характерно для случая больших перекладок руля, когда рост угла дрейфа сопровождается резким снижением скорости хода;
–необходимость учета ограничений на углы перекладки рулей направления с целью предотвращения возникновения больших углов дрейфа;
–затягивание, подлом и обрыв гибкого ограждения и соответствующее этим процессам резкое (скачкообразное при обрыве гибкого ограждения) изменение гидродинамических характеристик.
2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДВИЖЕНИЯ СУДНА НА ВОЗДУШНОЙ ПОДУШКЕ
2.1. Уравнения бокового движения СВП. Нелинейная модель
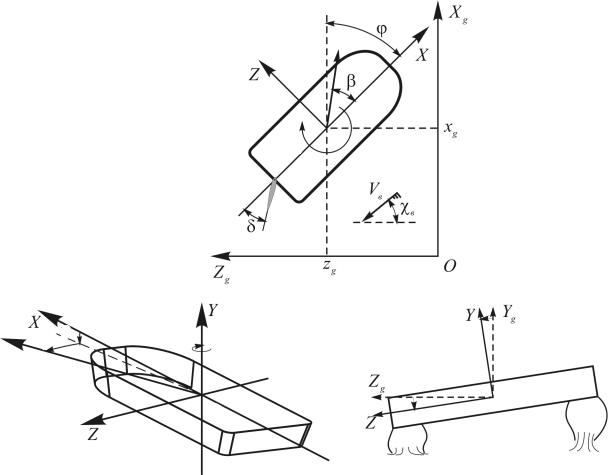
При описании бокового движения СВП используются полусвязанная и связанные системы координат (рис. 2.1). СВП имеет шесть степеней свободы, однако влияние динамики по дифференту и высоте центра масс на боковое движение СВП мало. Для анализа бокового движения СВП (при отсутствии течения) можно использовать следующую систему четырех уравнений:
|
dv |
|
|
|
= Fx (v, β, ϑ, |
ωy , |
δ, |
vw, ξw, |
hwv, ξwv, |
t), |
||
|
m |
|
|
x + ωyvz |
||||||||
|
|
dt |
|
|
|
|
|
|
|
|
||
|
dv |
|
|
|
|
= Fz (v, β, ϑ, |
ωy , |
δ, |
vw, ξw, |
hwv, ξwv, |
t), |
|
|
m |
|
z −ωyvx |
|||||||||
|
|
dt |
|
|
|
|
|
|
|
|
(2.1) |
|
|
Jx dωx = M x (v, β, ϑ, ωy , ωx, δ, vw, ξw, hwv, ξwv, t), |
|||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
J y |
dωy |
= M y (v, β, ϑ, ωy , δ, vw, ξw, hwv, ξwv, t), |
|
|||||||
|
|
|
|
|||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
где m, |
Jx, J y |
|
|
– масса и моменты инерции СВП по соответствующим осям; |
||||||||
v, vx, |
vz – скорость судна и ее проекции; ωx, ωy – угловые скорости вра- |
|||||||||||
щения; β,ϑ,δ – соответственно, углы дрейфа, крена и перекладки аэроруля; vw, ξw – скорость ветра и угол встречи ветра с корпусом судна; hwv,ξwv – высота волны 3 %-й обеспеченности и угол волнового склона; Fx , Fz , M x , M y – суммарные силы и моменты, действующие на СВП: гидродинамиче-
8
ские, аэродинамические, импульсные силы и моменты, а также силы и моменты от средств управления движением (вертикальные аэрорули, горизонтальные аэрорули, ВИШ – винты изменяемого шага), силы и моменты от волнового воздействия.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Хg |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
φ |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωy |
G |
|
хg |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vв |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
χв |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
zg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Zg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
||
|
ψ |
ωy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V
|
|
|
Zg |
θ |
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
||
|
|
|
|||
Z |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.1
Уравнения движения нелинейные, так как нелинейны зависимости сил и моментов от скорости хода, углов крена и дрейфа, угловых скоростей рыскания и крена, угла перекладки руля, скорости и направления ветра. При наличии волнения силы и моменты являются случайными функциями, спектральные плотности энергии которых зависят от высоты волны, угла встречи с волной и скорости хода СВП.
Для анализа пространственного движения СВП, режимов глубокого маневрирования, аварийных режимов движения необходимо использовать нелинейную модель. Для синтеза и анализа регулятора стабилизации бокового отклонения можно перейти к более простой модели движения, поскольку при работе регулятора стабилизации бокового отклонения СВП движется вблизи балансировочного режима.
9

2.2. Упрощенные уравнения движения СВП
Для перехода к упрощенной модели движения сделаем следующие допущения. Положим скорость хода постоянной, пренебрежем углом крена, проведем линеаризацию гидро- и аэродинамических характеристик СВП относительно балансировочного режима, оставив в уравнениях одну существенную нелинейность. Следует отметить, что существенных нелинейностей может быть несколько, но для простоты и наглядности курсового расчета оставлена одна F (β).
Для задачи анализа и синтеза регулятора стабилизации бокового отклонения допустимо упрощенное представление второй составляющей аэродинамической силы (силы от ветра)– линейное по безразмерному ветровому возмуще-
нию vw = vв |
v . Коэффициенты при ветровом возмущении vw могут быть по- |
|||||||||||||||||||||||||||
лучены с помощью численной линеаризации нелинейных уравнений (2.1). |
||||||||||||||||||||||||||||
При выводе уравнений учитывались соотношения: vx = vcos β, |
vz = vsinβ. |
|||||||||||||||||||||||||||
Таким образом, упрощенные уравнения движения СВП имеют вид |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ϕ = ωy , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ω |
y |
= a ω |
y |
+ F (β)+b |
|
δ+ c |
|
v |
+ m |
(t), |
(2.2) |
||||||||||||
|
|
|
|
|
|
22 |
|
|
21 |
21 |
w |
|
|
|
w |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
β = ω |
y |
+ a β+b δ+ c v |
w |
+ f |
w |
(t), |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
33 |
31 |
31 |
|
|
|
|
|
|
|
|
|
|||||||
где f |
w |
(t), m (t) |
– безразмерные сила и момент от волнения – случайные |
|||||||||||||||||||||||||
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
процессы со спектральными характеристиками, описанными ранее. |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Номер варианта |
|
|
|
a22 |
|
|
|
a33 |
|
|
b21 |
|
|
|
|
|
b31 |
|
c21 |
|
c31 |
|||||||
|
|
1 |
|
|
–0.014 |
|
|
|
–0.23 |
|
|
0.19 |
|
|
|
|
0.11 |
|
0.38 |
|
|
0.21 |
||||||
|
|
2 |
|
|
–0.016 |
|
|
|
–0.26 |
|
|
0.19 |
|
|
|
|
0.096 |
|
0.38 |
|
|
0.19 |
||||||
|
|
3 |
|
|
–0.021 |
|
|
|
–0.29 |
|
|
0.16 |
|
|
|
|
0.057 |
|
0.34 |
|
|
0.16 |
||||||
|
|
4 |
|
|
–0.013 |
|
|
|
–0.23 |
|
|
0.12 |
|
|
|
|
0.073 |
|
0.22 |
|
|
0.14 |
||||||
|
|
5 |
|
|
–0.016 |
|
|
|
–0.26 |
|
|
0.14 |
|
|
|
|
0.068 |
|
0.23 |
|
|
0.13 |
||||||
|
|
6 |
|
|
–0.021 |
|
|
|
–0.29 |
|
|
0.13 |
|
|
|
|
0.051 |
|
0.22 |
|
|
0.11 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Номер варианта |
|
|
|
|
|
|
|
|
|
|
|
|
β, ° |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
0 |
|
|
|
10 |
|
|
|
|
15 |
|
|
|
|
25 |
|
40 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
1 |
|
|
|
|
0 |
|
|
|
–0.045 |
|
|
–0.054 |
|
|
|
|
0.0016 |
|
0.086 |
|||||||
|
|
2 |
|
|
|
|
0 |
|
|
|
–0.066 |
|
|
–0.072 |
|
|
|
|
0.0010 |
|
0.11 |
|||||||
|
|
3 |
|
|
|
|
0 |
|
|
|
–0.099 |
|
|
–0.12 |
|
|
|
|
0.0013 |
|
0.18 |
|||||||
|
|
4 |
|
|
|
|
0 |
|
|
|
–0.033 |
|
|
–0.038 |
|
|
|
|
0.002 |
|
0.062 |
|||||||
|
|
5 |
|
|
|
|
0 |
|
|
|
–0.054 |
|
|
–0.061 |
|
|
|
|
0 |
|
0.092 |
|||||||
|
|
6 |
|
|
|
|
0 |
|
|
|
–0.087 |
|
|
–0.105 |
|
|
|
|
0.005 |
|
0.16 |
|||||||
10