Материал: Sb97588
МИНОБРНАУКИ РОССИИ
––––––––––––––––––––––––––––––––––––––––––––––––––––
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина)
–––––––––––––––––––––––––––––––––––––––––––
В. М. АМБРОСОВСКИЙ А. Г. ШПЕКТОРОВ
ИССЛЕДОВАТЕЛЬСКОЕ ПРОЕКТИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СКОРОСТНОГО СУДНА
Учебно-методическое пособие
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2017
УДК 629.5.05 (07)
ББК О 42-05я7
А84
Амбросовский В. М., Шпекторов А. Г.
А84 Исследовательское проектирование системы управления движением скоростного судна: учеб.-метод. пособие к курсовой работе по дисц. «Системы управления морскими подвижными объектами». СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2017. 35 с.
ISBN 978-5-7629-2414-6
Содержит указания по расчету и исследованию оптимального линейного закона стабилизации судна на воздушной подушке амфибийного типа на траектории. Подробно описаны особенности судна как объекта управления. Приведены теоретические основы синтеза и анализа системы стабилизации бокового отклонения.
Предназначено для магистрантов, обучающихся по направлению 27.04.00 «Управление в технических системах».
УДК 629.5.05 (07)
ББК О 42-05я7
Рецензент: кафедра судовой автоматики и измерений СПбГМТУ (зав. кафедрой канд. техн. наук доцент С. А. Согонов).
Утверждено редакционно-издательским советом университета
в качестве учебно-методического пособия
ISBN 978-5-7629-2414-6 |
© СПбГЭТУ «ЛЭТИ», 2017 |
2
ВВЕДЕНИЕ
Целью курсовой работы является выработка у студентов умения и практических навыков анализа судна на воздушной подушке амфибийного типа (СВП) как динамической системы, определения структуры и расчета параметров закона стабилизации бокового сноса СВП на основе теории оптимальных процессов, а также разработки структурной и принципиальной схем системы стабилизации бокового отклонения.
Курсовая работа включает в себя следующие основные этапы:
1.Постановку задачи, в ходе которой уточняются технические требования к рассчитываемой системе.
2.Исследование движения СВП в горизонтальной плоскости (определение установившихся режимов движения СВП в условиях безветрия и при ветре, анализ их устойчивости, определение областей притяжения устойчивых режимов, определение эффективности руля).
3.Расчет и исследование закона стабилизации бокового отклонения СВП (расчет оптимального закона управления, исследование корневых годографов оптимальной замкнутой системы, исследование зависимостей коэффициентов обратной связи от корней замкнутой системы).
4.Анализ динамики СВП с регулятором: исследование частотных характеристик и переходных процессов, сравнительный анализ реакции замкнутого и разомкнутого объекта управления на действие возмущения.
5.Разработка структурной и принципиальной схем системы стабилизации бокового отклонения.
1.ОСОБЕННОСТИ СВП КАК ОБЪЕКТА УПРАВЛЕНИЯ
Вцелях снижения сопротивления суда на воздушной подушке поднимаются над несущей поверхностью с помощью слоя сжатого воздуха (воздушной подушки). По способу образования воздушной подушки СВП подразделяются на амфибийные и скеговые. У большинства современных амфибийных судов воздушная подушка образуется по сопловой схеме, т.е. за счет сжатого воздуха, подаваемого из ресивера через специальные, обычно – гибкие сопла, расположенные по всему периметру воздушной подушки. Давление воздуха в ресивере создается осевыми или центробежными нагнетателями. Воздушная подушка амфибийных судов имеет гибкое ограждение – «юбку» и гибкие продольные и поперечные кили для секционирования воздушной подушки с це-
3
лью обеспечения продольной и поперечной остойчивости судна. Скеговые суда имеют корпус катамаранного типа. Воздушная подушка у этих судов только у носа и кормы ограничена гибким ограждением, а по бортам – водоизмещающими корпусами-скегами, постоянно погруженными в воду.
В качестве движителей на СВП амфибийного типа используют аэродинамические винты, а на скеговых судах применяют водометные движители или гребные суперкавитирующие гребные винты.
К средствам управления на амфибийных СВП относятся: вертикальные аэродинамические рули, создающие момент рысканья и боковую силу; побортно расположенные нагнетатели с заслонками, позволяющие регулировать подачу воздуха в ресивер и тем самым создавать момент крена, обеспечивать аварийную посадку судна; различного рода струйные рули или подруливающие устройства, создающие управляющие силы и моменты с помощью сжатого воздуха, находящегося в ресивере; побортно расположенные аэродинамические винты регулируемого или фиксированного шага, позволяющие плавно изменять тягу от полного хода вперед до полного хода назад с помощью механизма изменения шага или изменением оборотов.
СВП могут двигаться в водоизмещающем режиме и на воздушной п о- душке. В водоизмещающем режиме СВП ведет себя как обычное водоизмещающее судно. Динамические характеристики СВП при движении на воздушной подушке существенно различаются в диапазоне «догорбовых» (FrL < 0.5) и «загорбовых» (FrL > 1) скоростей.
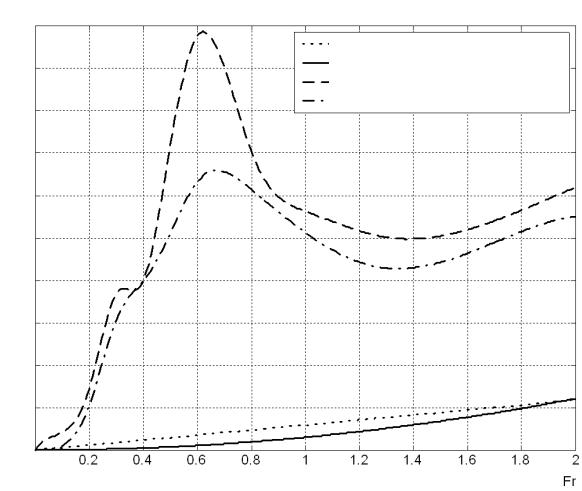
Составляющие буксировочного сопротивления СВП приведены на рис. 1.1. Из рисунка видно, что на «догорбовых» скоростях на движение СВП существенное влияние оказывают гидродинамические силы, а на «загорбовых» скоростях значение гидродинамических сил становится меньше, приближаясь к аэродинамическим силам. Характер движения СВП на «загорбовых» скоростях близок к движению СВП над твердой поверхностью (экраном). Максимум буксировочного сопротивления СВП существенно зависит от его центровки (от смещения центра тяжести): чем больше начальный дифферент судна на корму, тем больше «горб» сопротивления [1].
Для амфибийных СВП, обладающих малым удлинением (малым отношением LAC/BAC), характерна система поперечных волн. Значение волнового сопротивления находится в зависимости от числа Фруда. С увеличением числа Фруда при FrL > 0.6…0.7 (после «горба» сопротивления) волновое сопротивление монотонно падает вследствие инерционности воды.
4
Гидродинамические характеристики СВП существенно зависят от скорости хода, центровки и дрейфа судна. На рис. 1.2 приведена примерная зависимость гидродинамического момента СВП от угла дрейфа [2]. При увеличении скорости хода значение гидродинамических сил уменьшается. На «догорбовых» и «загорбовых» скоростях гидродинамические силы могут иметь разные знаки.
–Х/mg(Fr) 0.1
0.09
0.08
0.07
0.06
0.05
0.04
0.03
0.02
0.01
–X импульсное;
–X аэродинамическое;
–X гидродинамическое (xg/L = 4.46);
–X гидродинамическое (xg/L = 4.48)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0.2 |
|
0.4 |
|
0.6 |
|
0.8 |
|
1.0 |
|
1.2 |
|
1.4 |
|
1.6 |
|
1.8 |
|
2.0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fr |
Рис. 1.1
Вопросы стабилизации СВП на курсе или траектории, а также маневрирования очень сложны, особенно для амфибийных СВП, имеющих только аэродинамические средства управления, воздействие которых на движение судна сравнительно невелико. В отличие от водоизмещающих судов устойчивость амфибийных СВП на курсе существенным образом зависит от высоты подъема и дифферента [1]. При движении судна с дифферентом на корму точка приложения боковой силы гидродинамического взаимодействия гибкого ограждения смещена в корму относительно центра тяжести, что обеспечивает устойчивость судна на куре. При уменьшении ходового дифферента, вследствие увеличения скорости хода или изменения центровки, а также колебания по дифференту, указанное условие устойчивости судна на курсе мо-
5