Материал: 4551
11
2. МАТЕМАТИЧЕСКАЯ ОБРАБОТКА ТЕОДОЛИТНЫХ ХОДОВ
2.1. Уравнивание углов полигона
При математической обработке полевых измерений из полевого журнала записываются в ведомость вычисления координат (табл. 2), значения углов полигона в графу 3, а меры линий в графу 6. Вычисляют сумму углов графы 3 и записывают ее в этой же графе внизу. Затем вычисляют угловую невязку fβ по формуле
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
f |
|
изм |
|
|
теор , |
|
|
|
(1) |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
где |
изм |
– сумма измеренных углов (практическая); |
|
|
|
|
||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
теор |
– теоретическая сумма углов для полигона. |
|
|
|
|
||||||
|
|
|
теор = 180º·( n - 2), |
|
|
|
(2) |
|||||
|
где n – число углов в полигоне. |
|
|
|
|
|
||||||
|
В нашем примере (табл. |
2) f = + 0°01,5'. Полученную невязку |
||||||||||
необходимо сравнить с допустимой, которая вычисляется по формуле |
|
|
||||||||||
|
|
|
|
|
|
|
1 ΄ |
. |
|
|
(3) |
|
|
Если |
фактическая |
невязка |
|
допустима, |
т.е. f изм |
f |
доп , |
тогда |
ее |
||
распределяют на каждый угол по формуле |
|
|
|
|
|
|||||||
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
(4) |
|
|
|
|
|
|
n |
|
|
|
||||
Исправленное значение угла |
' |
вычисляют по формуле (5) |
и записывают в |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
графу 3 |
|
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|
|
Сумма всех поправок для углов должна |
равняться |
невязке, |
взятой |
с |
|||||||
обратным знаком, а сумма исправленных углов – ее теоретическому значению. Полученная невязка очень редко делится на п без остатка. Тогда возникает необходимость в одни углы вводить большие поправки, чем в другие. Так как углы, заключенные между короткими сторонами, измеряются с большей погрешностью (вследствие погрешностей центрирования и визирования теодолита), чем углы, заключенные между длинными сторонами, то большие поправки вводят в углы, заключенные между короткими сторонами. Поэтому в нашем примере углы при точках 1, 3 получили большие поправки, округленные до целых минут.

12
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
||
|
|
|
|
Ведомость вычисления координат вершин теодолитного хода |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
№ то |
Внутренние углы |
Дирек- |
Румбы |
|
Длины |
|
Приращение |
Приращения исправленные |
|
Координаты |
|
||||||||||
чек |
|
|
ционные |
линий |
|
линий |
|
вычисленные |
|
|
|
|
|
|
|
|
|
|
|
||
|
Измерен- |
Исправ- |
углы |
|
|
|
± |
Х |
± |
У |
± |
Х |
|
± |
У |
± |
Х |
± |
|
У |
|
|
ные |
ленные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
|
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
13 |
14 |
15 |
16 |
17 |
|
18 |
|
1 |
-01’ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
1000,00 |
+ |
|
1000,00 |
|
|
126°14΄ |
126° 13΄ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
38 °15 ΄ |
св: 38° 15΄ |
|
201,39 |
+ |
-0,03 |
+ |
-0,04 |
+ |
158,12 |
|
+ |
124,64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
158,15 |
|
124,68 |
|
|
|
|
|
|
|
|
|
|
|
2 |
124° 56 ΄ |
124° 56΄ |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
1158,12 |
+ |
|
1124,64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
93° 19΄ |
юв:86° 41΄ |
|
158,09 |
- |
-0,03 |
+ |
-0,03 |
- |
9,18 |
|
+ |
157,79 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9,15 |
|
157,82 |
|
|
|
|
|
|
|
|
|
|
|
3 |
-0,5΄ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
1148,94 |
+ |
|
1282,43 |
|
|
105 °07,5΄ |
105° 07΄ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
168° 12΄ |
юв:11° 48΄ |
|
156,00 |
- |
-0,03 |
+ |
-0,03 |
- |
152,73 |
|
+ |
31,87 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
152,70 |
|
31,90 |
|
|
|
|
|
|
|
|
|
|
|
4 |
146° 35 ΄ |
146° 35΄ |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
996,21 |
+ |
|
1314,30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
201° 37΄ |
юз : 21° 37΄ |
|
192,85 |
- |
-0,03 |
- |
-0,04 |
- |
179,32 |
|
- |
71,08 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
179,29 |
|
71,04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
101° 32΄ |
101° 35΄ |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
816,89 |
+ |
|
1243,22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
280° 05΄ |
сз : 79° 55΄ |
|
205,40 |
+ |
-0,04 |
- |
-0,04 |
+ |
35,92 |
|
- |
202,27 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
35,96 |
|
202,23 |
|
|
|
|
|
|
|
|
|
|
|
6 |
115° 37΄ |
115° 37΄ |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
852,81 |
+ |
|
1040,95 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
344° 28΄ |
сз : 15° 32 ΄ |
|
152,80 |
+ |
-0,03 |
- |
-0,03 |
+ |
147,19 |
|
- |
-40,95 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
147,22 |
|
40,92 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
1000,00 |
+ |
|
1000,00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=720°01,5΄ |
|
|
|
Р=1066,53 |
|
=+0,19 |
|
=+0,21 |
|
= 0 |
|
= 0 |
|
|
|
|
|
|
||
|
=720°00΄ |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
=+0°01,5΄ |
1 ΄ = 0°02,4΄ |
= = |
13
2.2. Вычисление дирекционных углов и румбов сторон хода
Для получения координат точек полигона нужно знать дирекционные углы и горизонтальные проложения линий. Зная дирекционный угол одной линии, можно вычислить дирекционные углы всех остальных линий полигона.
|
В нашем примере (табл. 2) в качестве исходного взят дирекционный угол |
|||
1 2 = 38°15' линии 1–2, условно равный магнитному азимуту. |
|
|||
|
Дирекционные углы сторон Si теодолитного хода (i =1, 2, ...,n) вычисляют |
|||
по формуле |
i 1 180 |
i , |
|
|
|
i |
(6) |
||
|
|
|
|
|
где i |
– дирекционный угол последующей линии; |
|
||
i |
1 – дирекционный угол предыдущей линии; |
|
||
i– исправленный внутренний угол полигона, лежащий справа по ходу. Для нашего примера
2 |
3 |
1 |
2 |
180 |
2 |
38 15' |
180 |
124 56 |
93 19'. |
|
|
|
|
|
|||||
Последовательно вычисляя дирекционные углы остальных сторон хода, |
|||||||||
должны получить исходный дирекционный угол, т.е. |
|
||||||||
1 2 |
6 |
1 |
180 |
1 |
344 28' |
180 |
126 13' |
38 15'. |
|
|
|
|
|
|
|||||
Это служит контролем вычисления дирекционных углов. Вычисленные дирекционные углы переводят в румбы линий полигона, записывают в графу 5, исходя из следующих зависимостей:
СВ r  ,
,  0
0 90
90 ,
,
ЮВ r 180 , (
, ( 90
90 180 ),
180 ),
ЮЗ r |
180 , ( 180 270 ), |
(7) |
СЗ r 360 , (
, ( 270
270 360 ),
360 ),
где r – румб (угол),
–дирекционный угол.
2.3.Вычисление горизонтальных проложений линий и расстояний,
недоступных для измерения лентой
Для изображения фигуры местности на горизонтальной плоскости следует знать горизонтальные проложения ее сторон. Их вычисляют по формуле
14 |
|
S S ' cos , |
(8) |
где S – горизонтальное проложение линии, м; |
|
S' – измеренное наклонное расстояние линии, м; |
|
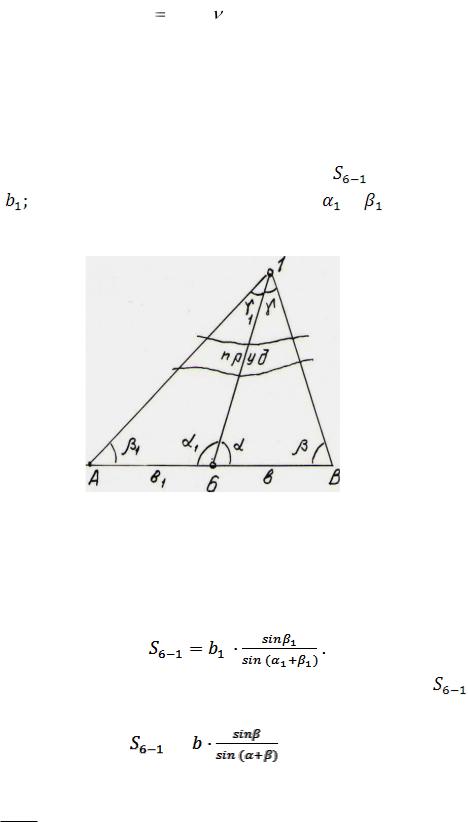
В практике встречаются случаи, когда линию нельзя измерить лентой из-за препятствий, пересекаемых линией, – река, болото, овраг и т.д. На рис. 2 приведен наиболее часто встречающийся случай.
Для определения недоступного расстояния |
измеряют: мерной |
|
лентой-базис |
теодолитом - горизонтальные углы |
и . |
Рис. 2. Схема определения расстояний, недоступных для измерения мерной лентой
Значение искомого расстояния вычисляют по теореме синусов:
(9)
Для контроля измеряют базис b, углы α и β и вычисляют повторно по формуле
= |
. |
(10) |
Относительное расхождение в двух вычислениях  допускается не
допускается не
1
более 1000 .
15
2.4. Вычисление и уравнивание приращений координат
Приращения координат X и |
Y сторон хода находят по формулам |
|
|||||||
|
|
|
|
|
|
|
|
|
|
X iпр. |
Si |
cos |
i |
ri , |
(11) |
||||
|
|
|
|
|
|
|
ri . |
(12) |
|
Yiпр. |
|
|
Si |
sin |
i |
||||
Знаки каждого приращения зависят от направления линии и определяются в зависимости от величины дирекционных углов или названий четвертей румбов. Для определения знаков приращений координат можно пользоваться данными табл. 3.
|
Таблица 3 |
Знаки приращений координат |
|
|
|
Название румба линии |
Знаки приращений |
|
|
X |
Y |
|
|
|
|
|
|
|
Северо-восток (СВ) |
+ |
+ |
|
|
|
|
|
|
|
Юго-восток (ЮВ) |
– |
+ |
|
|
|
|
|
|
|
Юго-запад (ЮЗ) |
– |
– |
|
|
|
|
|
|
|
Северо-запад (СЗ) |
+ |
– |
|
|
|
|
|
|
|
|
|
|
|
Знаки приращений записывают в графы 7 и 9, а абсолютные их значения
– в графы 8 и 10 (табл. 2). Невязки в приращениях координат находят по формулам
n |
n |
|
X i теор. 0, |
Yi теор. 0. |
(13) |
i 1 |
i 1 |
|
Алгебраическая сумма приращений координат в полигоне по каждой оси должна быть равна нулю, отличие от нуля и будет являться фактической невязкой, следовательно
n |
|
|
|
|
f x |
|
X i |
|
|
i 1 |
. |
(14) |
||
n |
||||
|
|
|||
f y |
|
Yi |
|
|
i |
1 |
|
|
|
Абсолютную величину линейной невязки хода подсчитывают по формуле
fабс |
f 2 fY2 . |
(15) |