Материал: 4461
16
накопленный опыт и интуицию, водитель выбирает расстояние с учётом всех факторов, характеризующих условие движения. Не удивительно, что фактические величины дистанций могут весьма значительно отличаться от значений, определённых на основании указанных выше умозрительных предпосылок на интервале между следующими один за другим автомобилями менее 9 - 10 с. на величину дистанции влияет и тип автомобиля (рис. 2.б). Наименьшие дистанции выдерживают при следовании легкового автомобиля за легковым, а максимальные - при движении грузового автомобиля за легковым. Характер зависимости дистанции от скорости одинаков для взаимодействующих автомобилей всех типов. Согласно имеющимся данным, первая дистанция безопасности может быть представлена в виде функции скорости обгоняющего автомобиля
= |
+4,0=0,33 |
|
+4 = 78,25 м. |
|
|
|
|
|
а вторая - в виде функции скорости обгоняемого автомобиля |
|
|||||||
= |
+4,0=0,26 |
+4 = 108 м. |
|
|
|
|
||
где |
и |
- |
эмпирические коэффициенты, |
зависящие |
от типа |
|||
обгоняемого автомобиля (таблица 4). |
|
|
|
|
||||
|
|
|
|
|
|
|
|
Таблица 4 |
|
|
|
Значения коэффициентов |
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Автомобили |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Легковые |
|
0,33 |
|
0,26 |
|
|
|
|
|
|
|||
|
Грузовые средней грузоподъёмности |
|
0,53 |
|
0,48 |
|||
|
|
|
|
|
||||
Грузовые большой грузоподъёмности и автопоезда |
|
0,76 |
|
0,67 |
||||
|
|
|
|
|
|
|
|
|
Вторая дистанция безопасности короче первой, так как водитель обгоняющего автомобиля стремится быстрее возвратится на свою полосу движения и иногда «срезает угол». Кроме того, скорость обгоняющего автомобиля больше скорости , поэтому если в момент завершения обгона дистанция между автомобилями и окажется короче допустимой, то она очень быстро увеличится.
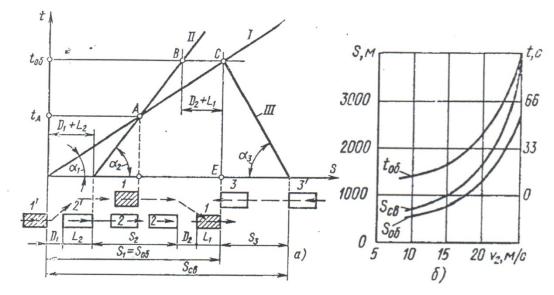
Для анализа процесса обгона удобно пользоваться схемой, на которой изображены зависимости между временем и перемещениями автомобилей (рис. 3а). Положения обгоняющего, обгоняемого и встречного автомобилей вначальный момент времени отмечены в нижней части схемы соответственно цифрами 1, 2 и 3. Движение всех трех автомобилей считаем равномерным, и
17
соответствующие зависимости S = S (t) представляют собой прямые линии /, //
и ///. Котангенсы |
углов , |
наклона этих прямых пропорциональны |
|
скоростям |
и |
автомобилей. |
В начале обгона расстояние между |
передними частями обгоняющего и обгоняемого автомобилей равно + . Точка A пересечения прямых / и // характеризует момент обгона, в который оба автомобиля поравнялись (время tA), после чего обгоняющий автомобиль начинает выходить вперёд. Чтобы определить минимально необходимые время и путь обгона, нужно найти на графике такие две точки В и С на линиях / и //,
расстояние между которыми по горизонтали было бы равно сумме |
+ . |
Тогда абсцисса точки С определит путь обгона, а ордината - время обгона. |
|
а – схема и график обгона; б – изменение , |
,и |
в зависимости от |
|
||||||||||
Рис. 3. Характеристики обгона при равномерном движении автомобиля |
|||||||||||||
Зная |
и |
, |
можно определить минимальное расстояние |
, которое |
|||||||||
должно быть свободным перед обгоняющим автомобилем в начале обгона: |
|||||||||||||
|
+ |
= |
|
|
|
|
= |
|
|
( |
+ |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
=1171,17 м. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
На рисунке 3, б показаны результаты расчёта |
, tоб и Sсв. При расчёте |
||||||||||||
принято: |
= 30 м/с, |
|
= 10 м/с, = |
= 5 м. Путь и время, необходимые для |
|||||||||
безопасного обгона, резко возрастают при увеличении скорости обгоняемого автомобиля. Так, при V2 = 10 м/с для безопасного обгона при отсутствии

18
встречного автомобиля необходимы расстояние примерно 500 м и время около
17 с. При повышении скорости до 20 м/с |
возрастает до 1260 м, а время до |
|
95 с. Соответственно увеличивается и |
расстояние |
Таким образом, если |
водитель обгоняемого автомобиля повысит скорость, не желая уступить дорогу, то это резко увеличит время и путь обгона и может привести к аварии. Поэтому правила дорожного движения категорически запрещают водителю обгоняемого автомобиля какими бы то ни было способами препятствовать завершению обгона.
Чем выше скорость обгоняющего автомобиля, тем меньше значения , и , необходимые для безопасного обгона. Поэтому наиболее безопасен обгон легковым автомобилем тихоходного транспортного средства, например автопоезда. Напротив, обгоны легковых автомобилей, предпринимаемые иногда торопящимися водителями грузовых автомобилей и даже автопоездов,
весьма опасны и нередко заканчиваются трагически.
Обгоны с постоянной скоростью возможны на дорогах с проезжей частью шириной более 7-8 м и интенсивностью движения в обоих направлениях менее 40 - 60 автомобилей в час, т. е. С интервалом движения около 1 мин. Значительно сложнее и опаснее обгонять при большой интенсивности движения. Так, если интенсивность превышает 150 - 160 автомобилей в час, то они движутся сплошным потоком. В этих условиях быстроходный автомобиль, догнав медленно движущийся автомобиль, уменьшает скорость и некоторое время движется позади него с той же скоростью. Водитель заднего автомобиля внимательно следит за потоком и при появлении перед обгоняемым автомобилем достаточного свободного расстояния начинает обгон, сочетая его с разгоном. Для того чтобы путь и время обгона были минимальными, интенсивность разгона должна быть максимально возможной.
Для расчёта пути и времени обгона в этом случае необходимо вначале построить графики интенсивности разгона, характеризующие зависимость между путём и временем движения автомобиля при ускоренном движении. Время разгона можно определить путём интегрирования выражения
j=
Подставив вместо j его значение согласно формуле j=
19
и интегрируя в пределах от V0 |
до V для скорости и от нуля до tp |
для |
|||||||||
времени разгона, получим |
|
|
|
||||||||
= |
|
|
|
|
= |
|
|
|
|
, |
(13) |
|
|
|
|
|
|
||||||
где |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Это время, необходимое для увеличения скорости автомобиля от |
доv. |
||||||||||
является минимально возможным, поскольку предполагается, что двигатель автомобиля работает с полной нагрузкой. Определять время разгона автомобиля аналитически, используя формулу (13), целесообразно лишь при наличии ЭЦВМ с готовой программой. Расчёты вручную по этой формуле достаточно трудоёмки, поэтому на практике обычно пользуются более простым графоаналитическим методом. Для этого кривую ускорений разбивают на ряд интервалов, начиная от и считают, что в каждом интервале скоростей автомобиль движется с постоянным ускорением jcp, величину которого определяют по формуле
= 0,5( |
), |
где |
- ускорения соответственно в начале и в конце интервала |
скоростей, |
|
При изменении скорости от ДО среднее ускорение
=( - )/( )= .
Следовательно, время разгона в том же интервале скоростей
=/
Время разгона в интервале скоростей -
=/
Общее время разгона от минимально устойчивой скорости до конечной t= + +…+ .
По значениям t, определённым для различных скоростей, строят кривую времени разгона, начиная её со скорости Vmin, для которой t = 0. Для скорости
откладывают значение |
, для |
скорости |
- значение ( + |
) и т.д. |
Полученные точки соединяют плавной линией. |
|
|
||
Для расчёта пути разгона |
формулу для ускорения представим в |
|||
следующем виде: |
|
|
|
|
j=(dv/dt)(dS/dS)=vdv/dS. |
|
|
|
|

20
Подставив вместо ускорения его значение согласно формуле (10) и интегрируя в пределах от до v для скорости и от 0 до Sp для пути, получаем
= -
При графоаналитическое расчёте минимального пути и разгона принимают условно, что автомобиль в каждом из намеченных интервалов
скоростей движется с постоянной скоростью |
= 0,5( |
+ ). Приращение пути |
||
в каждом из интервалов скоростей |
|
|
||
S= |
= |
/ |
|
|
Складывая |
полученные значения S, |
строят |
суммарную кривую Sp, |
|
начиная с той же скорости, с которой начинали строить кривую tp. Определив зависимость tp = t(v) и Sp=S(v) можно построить график интенсивности разгона, необходимый для расчёта пути и времени обгона с ускорением.
Для построения этого графика в координатах Sp - tp (рис. 4) наносят
сначала значения времени |
|
и пути соответствующие разгону обгоняющего |
|||||||||
автомобиля от скорости |
, до скорости |
, затем значения ( |
, + |
,) и ( |
+S2) |
||||||
для интервала скоростей |
( |
, |
,) и т.д. После этого полученные точки |
||||||||
соединяют плавной |
кривой |
ОО. На кривой отмечают точки |
, А2, ..., |
||||||||
соответствующие различным значениям (например, 5; 10...м/с). |
|
|
|||||||||
Для определения времени и пути обгона, |
сочетаемого |
с разгоном, |
на |
||||||||
кривой |
отмечают |
точку, |
соответствующую |
скорости |
|
2 |
обгоняемого |
||||
автомобиля (например. |
,), |
и от неё откладывают вправо по горизонтали |
|||||||||
отрезок, |
равный |
, + |
. |
Из конца отрезка проводят наклонную прямую, |
|||||||
параллельную касательной к кривой ОО |
в точке , |
и изображающую |
|||||||||
движение обгоняемого автомобиля. Точка С пересечения этой прямой с кривой ОО соответствует моменту времени, когда передние части обоих автомобилей находятся на одном уровне. При дальнейшем движении обгоняющий автомобиль начинает выходить вперёд. Чтобы определить минимально необходимые путь и время обгона, нужно на диаграмме найти такие две точки В и Е, расстояние между которыми по горизонтали было бы равно сумме D2+ . Зная положение начальной и конечной точек обгона, по шкалам Sp и tp находят путь и время обгона, сочетаемого с разгоном. Если нужно учесть возможность появления встречного автомобиля, то из токи Е проводят наклонную прямую под углом, соответствующим скорости этого автомобиля,