Материал: 4461
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|||
4) |
|
критический угол косогора, соответствующий началу поперечного |
||||||||||||||
опрокидывания ТС. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Критическая скорость криволинейного движения ТС по заносу: |
|
|||||||||||||||
|
|
|
= |
|
|
|
|
|
, |
|
|
(5) |
||||
|
|
|
|
|
|
|
|
|
|
|||||||
где g-ускорение силы тяжести; |
|
|
|
|
|
|
|
|
|
|
||||||
R-радиус траектории движения равен 15м; |
|
|
|
|||||||||||||
|
- поперечный коэффициент сцепления шин с дорогой равен 0,6. |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Следовательно, |
= |
|
|
|
= |
|
|
|
|
|
|
|||||
Критическая скорость криволинейного движения ТС по опрокидыванию |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
= |
|
/ |
|
= |
, |
(6) |
|||||||
гдеВ-колея ТС 1.970 м; |
|
|
|
|
|
|
|
|
|
|
||||||
h-высота центра масс 1,5 м; |
|
|
|
|
|
|
|
|
|
|
||||||
η=В/2h-коэффициент поперечной устойчивости η =1,970/2*0,7=1,41 |
|
|||||||||||||||
R- радиус траектории движения 15м. |
|
|
|
|
|
|||||||||||
|
= |
|
|
=14,4 м/с |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
При движении ТС по дороге с поперечным уклоном потеря устойчивости может произойти в результате действия поперечной составляющей силы тяжести, равной Gдsin . В случае, если вектор силы тяжести пересекает опорную поверхность вне колеи, опрокидывание неизбежно. Критический угол косогора по
условиям заноса: |
|
|
|
|
=arctg |
=arctg(0,6)=40° |
(7) |
||
Критический угол косогора, соответствующий началу поперечного |
||||
опрокидывания ТС: |
|
|||
=arctg |
|
|
= arctg η = arctg(1,41)= 54,65° |
(8) |
|
|
|||
12
Практическое задание № 4.
Определение критической скорости по условию управляемости
Критической скоростью по условиям управляемости называют максимальную скорость криволинейного движения автомобиля без поперечного проскальзывания управляемых колес.
= |
Lgcos , |
(9) |
- коэффициент поперечного сцепления;
f-коэффициент сопротивления качению принимаем равным 0,015; -угол поворота управляемых колес равен 45°.
= |
|
3,95 9,8 cos45°=20,93 м/с |
При достижении критической скорости Vy движения на повороте управляемые колеса проскальзывают в поперечном направлении и дальнейшее увеличение угла поворота управляемых колес не меняет направления движения.
13
Практическое задание №5
Определение времени и пути обгона автотранспорта
Обгон представляет собой сложный и опасный манёвр, вызванный желанием водителя двигаться без потерь времени. Обгон связан с выездом на соседнюю полосу движения и требует свободного пространства перед обгоняющим автомобилем. Трудность правильного выполнения обгона в сочетании с высокой скоростью требует от водителя безошибочного расчёта и точных действий по управлению автомобилем. Малейшая неосмотрительность при обгоне может привести к тяжёлым последствиям. Чем больше скорость транспортного средства, тем больше вероятность ДТП при обгоне. Так по данным США, при скорости транспортного потока около 11 м/с количество аварий при обгоне, при которых люди получили травмы, составило 14%. При скорости потока, равной 33 м/с, количество таких аварий возросло до 65%.
Манёвр обгона можно разделить на три фазы: отклонение обгоняющего автомобиля влево и выезд на соседнюю полосу движения; движение слева от обгоняемого автомобиля и впереди него; возвращение обгоняющего автомобиля на свою полосу впереди обгоняемого автомобиля.
Для простоты расчётов время, затраченное на поперечное смещение обгоняющего автомобиля и переход его с одной полосы движения на другую, не учитывают, так как это время невелико по сравнению с общим временем обгона. Не учитывают и увеличение пути автомобиля, вызванное этим смещением.
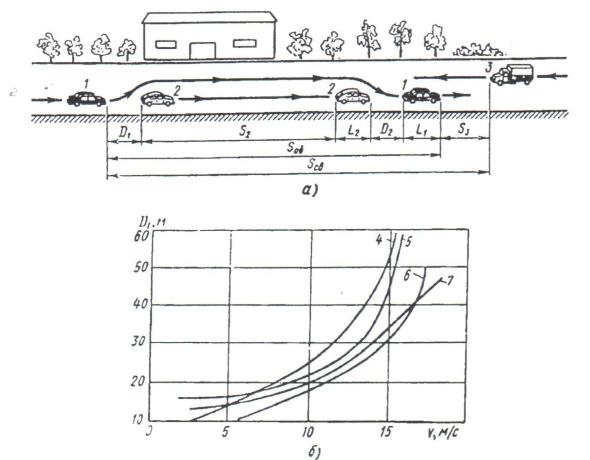
В зависимости от условий движения на дороге обгон может совершаться либо с постоянной, либо с возрастающей скоростью. Обгон с постоянной скоростью характерен для свободного, нестеснённого движения автомобиля в загородных условиях. Тогда водитель обгоняющего автомобиля 1 (рис. 2) имеет впереди себя достаточное пространство для предварительного разгона до большей скорости . Эта скорость должна быть больше скорости обгоняемого автомобиля 2. Время tоб и расстояние Sоб= , необходимые в этом случае для безопасного обгона, определяют следующим образом.
14
а – схема обгона; б – дистанция безопасности при следовании автомобиля в потоке где:1- обгоняющий автомобиль; 2 – обгоняемый автомобиль; 3 – встречный
автомобиль; 4 – грузовой автомобиль, следует за легковым; 5 – грузовой автомобиль движется за грузовым; 6 – легковой автомобиль следует за легковым; 7 – легковой автомобиль следует за грузовым.
Рис. 2. Обгон автомобиля
Пусть первый автомобиль, совершающий обгон, Москвич-2138 (La=4,210 м.) движется со скоростью равной 20 м/с. Второй - ГАЗ24 (La=4,735 м.)
движется со скоростью равной 15 м/с. |
|
||
Путь обгона: |
|
||
Sоб =S1 = Di+D2+S2+L1+L2 |
(10) |
||
или |
|
|
|
Sоб =S1= |
=20 39,039 = 780,78м, |
(11) |
|
где |
и |
- дистанции безопасности между обгоняющим и обгоняемым |
|
автомобилями в начале и конце обгона, м;
и- габаритные длины автомобилей 1и 2, м;
-путь обгоняемого автомобиля, м.
15
Путь обгоняемого автомобиля: |
|
|
|
|||||||||||
= |
= |
|
|
= 15 |
|
=585,585 м. |
(12) |
|||||||
|
|
|||||||||||||
Из формул (10) - (12) получаем |
|
|
|
|||||||||||
Sоб |
|
|
|
|
+ |
+ + |
|
|
|
|||||
|
|
|
|
|
= |
|
|
|
||||||
Следовательно |
|
|
|
|
|
|
|
|||||||
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Время обгона |
|
|
|
|
|
|
|
|||||||
= |
|
= |
|
|
|
|
|
|
= |
|
|
|
= 39,039 с. |
|
|
|
|
|
|
|
|
|
|
|
|||||
Таким образом, время и путь обгона в большой степени зависят от |
||||||||||||||
скорости |
обгоняющего автомобиля |
. Чем |
динамичнее автомобиль, тем |
|||||||||||
меньше значения Sоб |
и |
следовательно, тем быстрее автомобиль может |
||||||||||||
вернуться на свою полосу движения, обеспечив необходимую безопасность. Многочисленные наблюдения показали, что при свободном движении скорости обгоняющих автомобилей достаточно высоки, но не достигают предельных значений и обычно составляют 80 - 90% максимально возможной скорости.
Величины дистанций безопасности и в большой степени зависят от дорожных условий, типа автомобиля, опыта и квалификации водителя. Точный их расчёт невозможен, поэтому правилами дорожного движения предусматривается, что дистанции между автомобилями выбирает сам водитель. Для ориентировочных расчётов этих расстояний в литературе имеется много различных предложений. Так, некоторые авторы определяют эти дистанции, исходя из времени, необходимого водителю для оценки обстановки перед обгоном. Это время принимают в интервале 2-5 с. Другие исследователи считают дистанции и примерно равными остановочному пути обгоняющего автомобиля. Третьи предлагают уравнения, в которых учитывается разность тормозных путей обгоняющего и обгоняемого автомобилей. Массовые наблюдения, проведённые в различных условиях, показали недостоверность этих предпосылок. В действительности водители при определении дистанции безопасности при обгоне учитывают не только возможность экстренного торможения переднего автомобиля, но и вероятность его в данной дорожной обстановке. Другими словами, опираясь на