Материал: 3731
А9 |
А10 |
|
А8 |
||
|
А7
А6  О
О 
А5
А4 А3 А2
А11 |
|
|
|
B6 B7 B8 |
B9 |
B10 |
B11 B0 |
А0 |
|
|
|
В5 В4 |
В3 |
В2 |
В1 |
А1 |
|
|
|
Рис. 2.1 Планы положений механизма
Графический способ определения кинематических характеристик механизма методом кинематических диаграмм
Данный способ заключается в определении графиков (кинематических диаграмм) изменения перемещения, скорости, ускорения в функции времени t. Пусть необходимо построить кинематические диаграммы S = f (t); V = f (t);
а= f (t) точки В кривошипно-ползунного механизма. Для этого:
1 Строим отрезок ℓ=ОО мм, изображающий время одного полного оборота кривошипа ОА в масштабе t.
|
|
= |
t |
|
, |
(2.2) |
|
t |
l |
||||||
|
|
|
|
||||
|
|
|
|
|
|||
где t – время одного полного оборота кривошипа, с |
|
||||||
t = 60 |
, |
(2.3) |
|||||
|
|
n |
|||||
n – частота вращения кривошипа, об/мин.
Отрезок ℓ=ОО делим на 12 равных частей. На плане положений механизма определяем расстояния В0В1; В0В2; В0В3 и т.д., откладываем их в одноименных точках 1; 2; 3 и т.д. Масштабный коэффициент S для оси перемещения диаграммы S = f (t) принимаем равный двум масштабным коэффициентам плана положений механизма S = 2 l .
2 Соединив последовательно плавной кривой полученные точки 0; 1/; 2/; 3/ и т.д., получим диаграмму перемещения точки В (рис. 2.2). Диаграмма скорости точки В (V = f (t)) получается графическим дифференцированием диаграм-
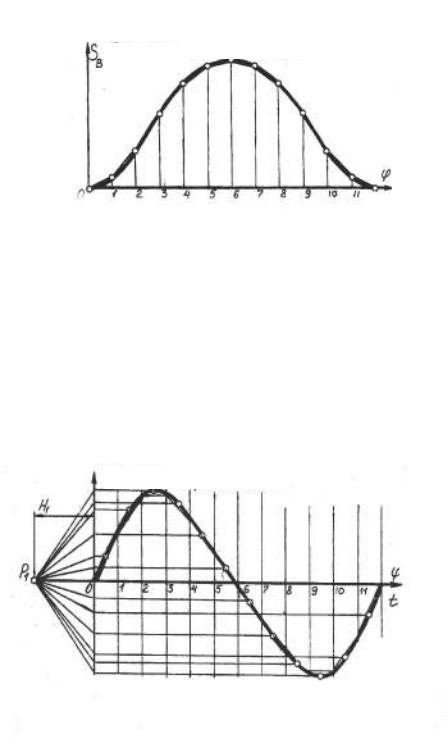
мы S = f (t). Графическое дифференцирование выполняется методом хорд в следующей последовательности:
|
|
6' |
|
5' |
7' |
4' |
|
8' |
3' |
|
9' |
2' |
|
10' |
1' |
|
11' |
О
Рис. 2.2 Диаграмма перемещения точки В
а) под диаграммой S = f (t) строим параллельную систему координат V = f (t) и влево от точки О1 откладываем отрезок О1Р=Н1 [мм]. Из точки Р проводим лучи параллельно хордам 01/; 1/2/; 2/3/ до пересечения с осью 0S. От полученных точек проводим горизонтали до середины диапазонов, в которых проведены хорды. Соединив точки в серединах диапазонов плавной кривой, получим диаграмму V = f (t) (рис. 2.3).
Рис. 2.3 Диаграмма скорости точки В
Имея диаграмму скорости, аналогично строим диаграмму ускорения, а=f(t) (рис. 2.4).
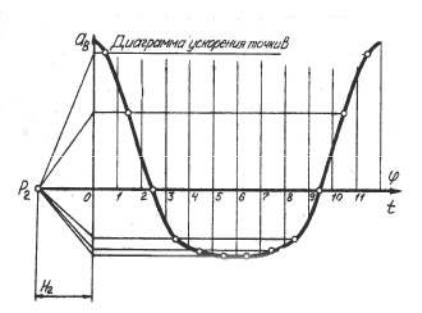
Масштаб t для всех графиков остается неизменным. Масштабы по осям ординат определяются по следующим формулам:
для диаграммы скоростей
|
v |
= |
|
s |
|
|
,; |
|
(2.4) |
|
|
|
|
|
|||||||
|
|
|
t |
Н1 |
|
|||||
для диаграммы ускорения |
|
|
|
|
|
|
|
|
|
|
|
|
a = |
|
v |
, |
(2.5) |
||||
|
|
|
|
|
|
|||||
|
|
|
|
t |
|
Н2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис 2.4 Диаграмма ускорения точки В
Из формул видно, что величины масштабов зависят от полосных расстояний Н1 и Н2.
Графоаналитический метод определения кинематических характеристик
Кинематическое исследование этим методом осуществляется в следующей последовательности:
1)производится структурный анализ заданного механизма;
2)вычерчивается механизм в положениях, для которых требуется построить планы скоростей и ускорений;
3)строятся планы скоростей и ускорений сначала для ведущих звеньев, а затем для всех групп Ассура.
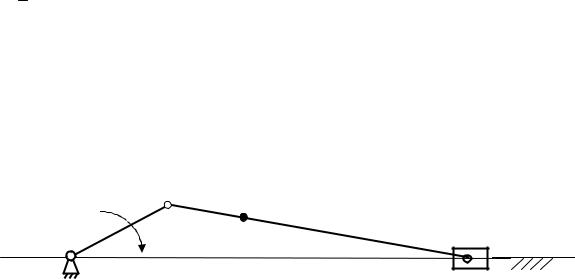
Произведем кинематический анализ кривошипно-ползунного механизма в заданном положении (рис. 2.5). Известно, что кривошип ОА вращается с посто-
янной угловой скоростью ω (рад/с), а также даны основные размеры lОА; lАВ; l АS2 = 13 l АВ . Точка S2 является центром масс шатуна.
Произведя структурный анализ, установим, что механизм состоит из механизма первого класса, содержащего звенья 0; 1 и группы Асура II класса 2-го порядка, включающей звенья 2; 3. Число степеней подвижности механизма – единица (W=1).
|
|
А |
S2 |
|
ω |
|
|
|
|
2 |
|
О 1 |
|
|
|
|
|
В |
|
х |
|
|
х |
|
|
|
3 |
Рис. 2.5 Кинематическая схема кривошипно-ползунного механизма
Построение плана скоростей
Значение скорости точки А определяется по формуле
VA = ω lOA , , |
(2.6) |
для построения плана скоростей необходимо выбрать масштабный коэффициент
µ |
|
= |
vA |
, , |
(2.7) |
v |
|
||||
|
|
P |
|
||
|
|
|
|
||
|
|
|
a |
|
|
где Ра – длина отрезка, изображающего вектор скорости ϑА.
Для определения скорости точки В составим векторное уравнение. Точка В совершает сложное движение: она повторяет движение точки А и одновременно вокруг нее вращается.
ϑB = ϑA +ϑBA , |
(2.8) |
где ϑB - вектор скорости точки В; ϑA - вектор скорости точки А;

ϑBA - вектор скорости точки В в ее относительном движении вокруг точ-
ки А.
|
Это векторное уравнение решается графически (рис. 2.6). |
|||
Р |
r |
|
b |
Отрезок РА, изображающий скорость ϑA , |
ϑ B |
откладывается из полюса Р плана скоростей в |
|||
|
|
|
|
|
|
r |
|
|
направлении вращения кривошипа перпендику- |
|
ϑ |
S 2 |
ϑBA |
лярно ОА, из точки а проводится прямая, пер- |
|
|
пендикулярная шатуну АВ, а из точки Р прово- |
||
|
ϑ A |
|
S2 |
дится прямая, параллельная оси х-х. Обе прямые |
|
|
|
пересекаются в точке b. Отрезок Рb обозначает |
|
|
|
|
|
|
aϑB – вектор скорости точки В, а отрезок ва - ϑBA –
Рис. 2.6 План скоростей |
вектор скорости точки В в ее |
относительном |
||||||||||
|
|
движении вокруг точки А. |
|
|
|
|||||||
Скорость точки S2 центра масс шатуна АВ находится из подобия |
|
|
|
|||||||||
|
|
аS |
2 |
= |
|
lAS |
2 |
|
, отсюда |
|
|
|
|
|
ав |
|
lAB |
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
l AS |
|
|
ав , |
|
|
|
|
|
|
аS |
|
= |
2 |
|
|
|
|
|||
|
|
2 |
|
l AB |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
где |
l AS , l AB - реальные размеры механизма. |
|
|
|
||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
Отрезок aS2 плана скоростей определяет положения точки S2 |
вектора |
|
S2 на |
|||||||||
ϑ |
||||||||||||
отрезке ав. Соединив точку S2 с полюсом плана Р, получим отрезок РS2, изображающий в масштабе µv скорость ϑS2 точки S.
Для определения величин скоростей необходимо длины отрезков плана скоростей умножить на масштабный коэффициент µv
VB = Pв v ; VBA = вa µv ; |
VS2 = PS2 µv |
Построение плана ускорений
Величина ускорения точки А определяется по формуле
2
аА = аnAO = VA , (2.9)
l OA
Задаваясь длиной отрезка Па [мм], изображающего на плане ускорений вектор
r
аА определяем коэффициент плана ускорений µа
а = |
аА |
,. |
(2.10) |
|
Па |
||||
|
|
|
Ускорение точки В найдется из векторного уравнения