Материал: 3731
На протяжении одного оборота кулачка можно различить следующие фазы движения толкателя:
-фазу удаления (толкатель удаляется от центра кулачка);
-фазу дальнего состояния (толкатель стоит неподвижно в положении, наиболее удалённом от центра вращения кулачка O1);
-фазу возвращения (толкатель приближается к центру O1);
- фазу ближнего состояния (толкатель стоит неподвижно в положении, наиболее близком к центру вращения кулачка O1).
Кулачок поворачивается за это время на центральные углы, называемые соответственно фазовыми углами удаления φу, дальнего стояния φд, возвра-
щения φв и ближнего стояния φб, |
т.е. |
|
ϕ у +ϕ |
д +ϕв +ϕб = 360o. |
(1.3) |
Сумма ϕ у +ϕд +ϕв +ϕб = ϕ р называется рабочим углом кулачкового меха-
низма. При наличии эксцентриситета фазовые углы φу и φв не совпадают с аналогичными углами на профиле кулачка.
Углы давления и передачи движения в кулачковых механизмах
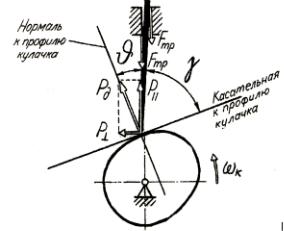
Важными динамическими параметрами кулачкового механизма являются угол давления ϑ и угол передачи движения γ.
Угол давления ϑ - острый угол между линией действия силы давления Рд кулачка на ведомое звено и направлением движения ведомого звена (рис. 1.15).
Угол передачи движения γ - угол между касательной к профилю кулачка в точке взаимодействия кулачка с ведомым звеном и направлением движения ведомого звена.
Углы γ и ϑ связаны соотноше-
нием: γ = 90°- ϑ. |
(1.4) |
Силу давления кулачка Pд на ведомое звено можно представить в виде суммы сил РП, параллельной направлению движения ведомого звена, и Р - перпендикулярной направлению движения ведомого звена. Сила PП движет ведомое звено, а сила Р толкает его в сторону, вызывая перекос в направляющих и возбуждая силы трения в опорах Pmp, направленные против PП. При больших углах давления (малых углах передачи движения) со-
ставляющая Р возрастает, и возбуждаемые ею силы трения Ртр могут превысить силу РП, движущую ведомое звено. В этом случае механизм заклинит. Угол
давления ϑдоп, при котором наступает заклинивание механизма, называется
критическим.
Угол ϑдоп задается при проектировании механизма. Чем меньше угол ϑдоп, тем лучше условия работы пары кулачок - ведомое звено. Однако уменьшение ϑдоп без изменения закона движения и при заданной величине эксцентриситета е невозможно без увеличения размеров кулачка.
Практикой установлено, что для нормальной работы, кулачковых механизмов угол давления не должен превышать следующих значений:
ϑдоп ≤ 30° - для механизмов с толкателями, ϑдоп ≤ 45 ° - для кулачково-коромысловых механизмов.
Угол передачи движения должен быть не меньше:
γдоп ≥ 45 °- для кулачково-коромысловых механизмов, γдоп ≥ 45 °- для механизмов с толкателями.
Увеличения радиуса основной шайбы r0 ведёт к уменьшению угла давления. При проектировании кулачковых механизмов наименьших размеров тре-
буется подобрать такой минимальный радиус кулачковой шайбы r0, чтобы ни в одном из положений механизма угол передачи движения γ не был меньше за-
данного допустимого значения γдоп т.е. |
|
γ ≥ γдоп |
(1.5) |
Если задан закон движения толкателя S = f(ϕ) и минимальный угол передачи движения γдоп, то можно определить минимальный радиус основной шайбы r0 и величину эксцентриситета е.
Помимо сложных аналитических, разработаны графические приёмы определения r0 и е по условию γ ≥ γдоп.
Структурный анализ механизмов
Последовательность выполнения структурного анализа
1 Составляется кинематическая и структурная схема механизма. Кинематическая схема показывает принцип работы механизма, т.е. от-
носительное перемещение звеньев, и строится в определенном масштабе с обозначением всех звеньев и кинематических пар.
Структурная схема составляется для структурного анализа механизмов и отличается от кинематической схемы следующим:
а) высшие кинематические пары заменяются условным звеном, входящим в две низшие кинематические пары;
б) поступательные пары заменяются вращательными, поскольку они структурно эквивалентны (относятся к пятому классу);
в) избыточные связи и лишние степени свободы убираются;
г) звенья, входящие в три кинематические пары, заменяются треугольником; в четыре кинематические пары четырехугольником и т.д.
2 Определяется число степеней подвижности.
3 Механизм разделяется на группы Ассура и механизмы первого класса. Отделение группы Ассура начинается с последнего звена (ведомого). После отделения группы Ассура число степеней свободы оставшейся части механизма измениться не должно.
Сначала пытаются отделить простейшую группу Ассура (2 звена 3 кинематические пары). Если число степеней механизма изменяется, то отделяют более сложную группу Ассура.
4 Определяется класс и порядок групп Ассура и класс всего механизма. 5 Записывается формула строения механизма.
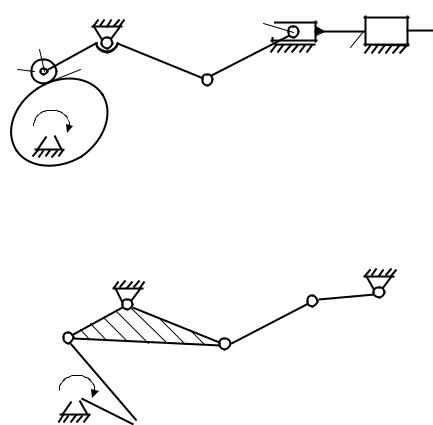
ПРИМЕР: Необходимо произвести структурный анализ механизма.
Из кинематической схемы (рис. 1.16) видно, что механизм состоит из пяти подвижных звеньев (1; 2; 3; 4; 5) шести низших (A; C; D; E; F; H) и одной высшей кинематической пары. При составлении структурной схемы (рис. 1.17 ) механизма необходимо заменить высшую кинематическую пару В на низшие, отбросить звено 2 (ролик), т.к. оно дает лишнюю степень свободы, звено 3 заменить треугольником, т.к. оно входит в три кинематические пары, поступательную пару Н заменить на вращательную.
|
|
|
|
|
|
F |
5 |
|
|
D |
|
|
|
|
|
|
С |
3 |
|
4 |
|
H |
|
2 |
В |
|
|
E |
|
|
|
|
|
|
|
|
1
А
Рис. 1.16 Кинематическая схема механизма
|
D |
F 5 |
H |
|
3 |
E 4 |
|||
|
|
|||
С |
|
|
2
А 
1  В
В
Рис. 1.17 Структурная схема механизма
По формуле Чебышева определяем число степеней свободы механизма W = 3n − 2p2 − p1 = 3×5-2×7-0=1.
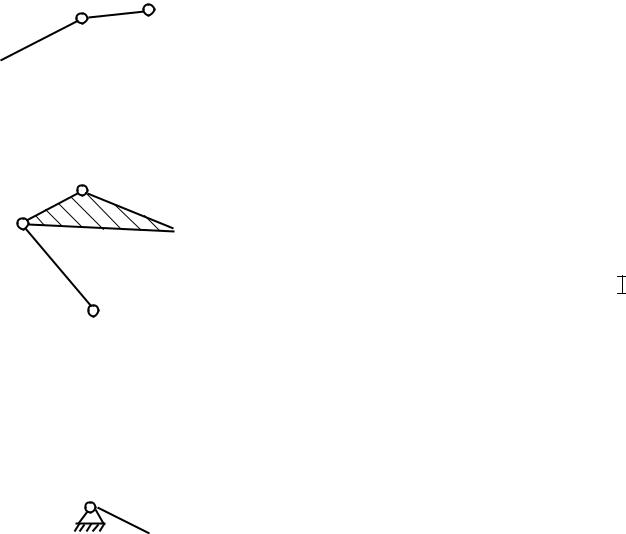
Отделяем группу Ассура второго класса, второго порядка (рис. 1.18), при этом число степеней подвижности оставшейся части механизма остается неиз-
|
F 5 |
|
менным. Отделяем следующую |
|
H |
группу Ассура, содержащую звенья |
|
E |
4 |
|
2; 3, она также имеет второй класс и |
|
|
 второй порядок (рис. 1.19). Рис. 1.18 Группа Ассура 4-5
второй порядок (рис. 1.19). Рис. 1.18 Группа Ассура 4-5
D |
3 |
После отделения групп Ассура |
||
остается механизм первого |
класса, |
|||
С |
||||
|
||||
|
состоящий из стойки-0 и ведущего |
|||
|
|
|||
2 |
|
звена-1(рис. 1.20). Записываем фор- |
||
|
мулу строения механизма |
|
||
|
|
|
||
|
В |
I(0;1) →II2(2;3) →II2(4,5) |
(1.6) |
|
Рис. 1.19 Группа Ассура 2-3
Формула читается следующим образом: механизм первого класса, содержащий звенья один и два, присоединяет к себе группу Ассура второго класса второго порядка, содержащую зве-
А |
нья два, три и присоединяет группу |
|
1 |
||
Ассура второго класса второго по- |
||
0 |
||
рядка, содержащую звенья четыре, |
||
|
||
Рис. 1.20 Механизм первого класса |
пять. |
РАЗДЕЛ 2 КИНЕМАТИЧЕСКИЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Кинематический анализ механизма – изучение движения звеньев механизма без учета масс звеньев и сил, действующих на механизм.
Задача кинематического анализа состоит в определении перемещений звеньев, траекторий точек звеньев, а также в нахождении скоростей и ускорений точек в функции времени или в функции перемещения начальных звеньев.
Кинематический анализ может производиться следующими способами: 1 Графическим (с помощью построения диаграмм перемещения, скоро-
стей, ускорений).
2 Графоаналитическим (построение планов скоростей, ускорений со вспомогательными расчетами по формулам).
3 Аналитическим (с помощью формул).
Определить положения звеньев механизма, их перемещения и траектории точек в зависимости от положения ведущего звена можно графическим способом (методом построения планов механизма).
Построение планов положений механизма
Рассмотрим графический метод построения планов положений механизма на примере кривошипно-ползунного механизма. Заданы длины звеньев ℓОА,; ℓАВ, положение направляющей оси Х-Х (рис. 2.1). Примем, что ведущее звено ОА вращается с постоянной угловой скоростью. Строим кинематическую схему механизма в определенном масштабе:
l |
= |
lОА |
= |
l АВ |
, |
(2.1) |
|
|
|||||
|
|
ОА АВ |
|
|
||
где ℓОА; ℓАВ – действительные длины звеньев; ОА, АВ – длины звеньев, отложенных на кинематической схеме в масштабе.
Из точки О проводим окружность радиуса ОА и отмечаем на ней положения точки А ведущего звена – АО, А1…А11. Положения звена АВ определяют методом засечек. Точка В движется по прямой Х-Х. Ее положения ВО, В1…В11 получим на пересечении оси Х-Х с дугой окружности В-В радиуса АВ, описанной из точек АО, А1…А11 соответственно. Соединив точки АО, А1, А2…А11 с центром О, а также с точками ВО, В1, В2… В11, получим планы механизма в 12 положениях (рис. 2.1).