Материал: 3731
W = 3n − 2p2 − p1 ;
W=0; p1=0 → n = ⅔ p2
Данное выражение удовлетворяет следующий ряд целых чисел:
n |
2 |
4 |
6 |
8 |
… |
р2 |
3 |
6 |
9 |
12 |
… |
Пользуясь данными значениями, можно составить различные группы Ассура (рис. 1.6).
B B

 F
F  B
B 


 E
E
A  C A
C A

 F
F
A C 



 C
C 
 D
D
D  E
E
Рис. 1.6 Примеры групп Ассура
Класс группы Ассура определяется высшим классом замкнутого контура, входящего в его состав.
Класс замкнутого контура определяется количеством кинематических пар, входящих в контур.
Порядок группы Ассура определяется числом свободных элементов, которыми группа Ассура присоединяется к механизму.
Избыточные связи. Лишние степени свободы Замена высших кинематических пар на низшие
Избыточные (пассивные) связи – звенья и кинематические пары, формально уменьшающие степень подвижности механизма, но фактически не влияющие на его кинематику. При конструировании плоских механизмов избыточные связи часто вводят по конструктивным соображениям для повышения жесткости конструкции, снижения контактных напряжений или для устранения неопределенности их движения в некоторых положениях.
На рис. 1.7 а представлена схема механизма, избыточными связями которого являются звено 1 и кинематические пары А и F. При подсчете числа степеней свободы получим ноль. Фактически число степеней свободы этого механизма – единица. После удаления избыточных связей из механизма (рис.1.7 б) получим W=1.
С |
3 |
D |
В |
2 |
|
|
С |
||
2 |
|
4 |
1 |
3 |
|
|
|
||
В |
|
|
А |
D |
|
|
E |
|
|
А  F 1
F 1
б
а
Рис. 1.7 К определению избыточных связей в механизме
Лишние степени свободы – степени свободы, не оказывающие влияния на кинематику механизма.
На рис. 1.8 а представлен кулачковый механизм, число степеней свободы которого равняется двум. Лишнюю степень свободы дает звено 2 - ролик, которое не влияет на кинематику движения механизма. Удалив ролик из механизма, получим W=1 (рис. 1.8 б).
D |
|
C |
|
|
|
3 |
|
2 |
2 С |
|
В |
В |
|
1 |
|
|
|
1 |
|
|
А |
а |
А |
|
б |
Рис. 1.8 Кинематическая схема кулачкового механизма
Для упрощения анализа механизмов часто избавляются от высших кинематических пар, заменяя их низшими. Одну высшую кинематическую пару можно заменить двумя низшими и звеном, длина которого равна сумме радиусов кривизны соприкасающихся поверхностей, образующих высшую кинематическую пару. Высшая кинематическая пара В образована зацеплением двух зубчатых колес 1 и 2 (рис. 1.9 а), заменим ее двумя низшими кинематическими парами В, С и звеном 2, длина r которого равна сумме радиусов зубчатых колес r1 и r2 (рис 1.9 б). Кулачковый механизм содержит высшую кинематическую пару В (рис. 1.9 в), ее заменяем низшими кинематическими парами В,С и звеном 2 длинной r, причем r=r1(рис. 1.9 г)
|
В |
2 |
В |
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
А |
|
|
|
|
|
D |
|
А |
r1 |
С |
r |
|
|
r2 |
|
||
|
|
|
2 |
3 |
|
а |
|
б |
С |
|
|
|
||
|
С |
|
D |
|
|
|
2 |
|
3 |
|
В |
|
С |
|
|
|
1 |
|
r |
|
|
|
2 |
|
|
А |
r1 в |
г А |
|
|
|
|||
|
|
|
|
1 |
|
|
|
|
В |
Рис. 1.9 К замене высших кинематических пар низшими
Понятия о кулачковых механизмах
Кулачковый механизм – механизм, состав которого входит кулачок, т е звено высшей кинематической пары, элемент которого выполнен в виде поверхности переменной кривизны.
Обычно кулачок является ведущим звеном. Ведомое звено кулачкового механизма называется толкателем, если совершает возвратно-поступательное движение, или коромыслом, если совершает возвратно-вращательное движение Кулачковые механизмы широко распространены в технике, поскольку позволяют обеспечить практически любой закон движения ведомого звена,
включая его остановки при малых габаритах механизма.
Классификация плоских кулачковых механизмов
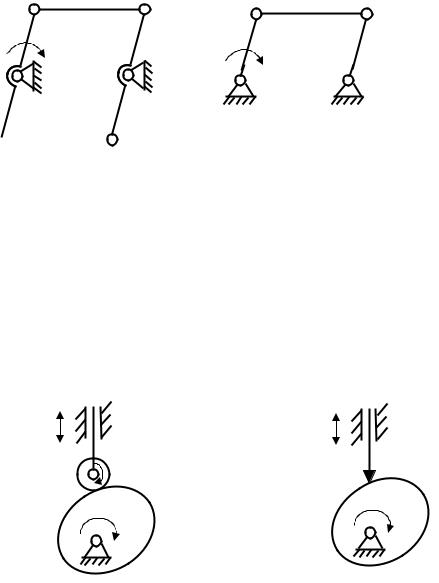
1 По виду движения ведущего звена (кулачка):
-механизмы с вращающимся кулачком (рис. 1.10 а);
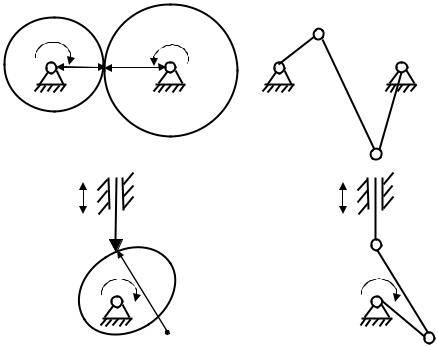
-механизмы с возвратно-поступательным движением кулачка (рис. 1.10 б). 2 По виду движения ведомого звена:
-механизмы с возвратно-поступательным движением толкателя (рис. 1.11 а);
-механизмы с возвратно-вращательным движением коромысла (рис. 1.11 б);
-механизмы со сложным движением ведомого звена (рис. 1.11 в).
3 По характеру соприкосновения ведомого звена с кулачком:
-механизмы с остроконечным толкателем или коромыслом (рис. 1.12 а);
-механизмы с роликовыми толкателем или коромыслом (рис. 1.12 б);
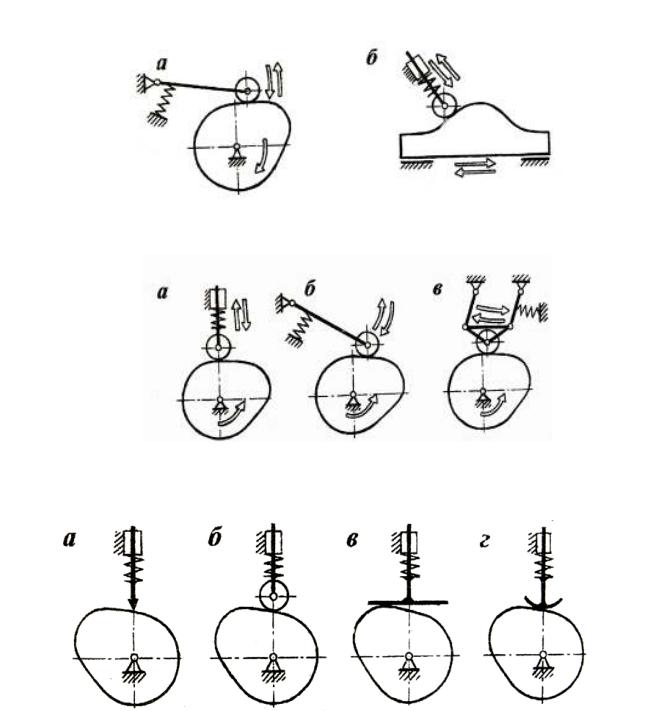
-механизмы с плоским (тарельчатым) толкателем (рис. 1.12 в);
-механизмы со сферическим (грибовидным) толкателем (рис. 1.12 г).
Рис. 1.10 Классификация кулачковых механизмов по движению кулачка
Рис.1.11 Классификация кулачковых механизмов по движению ведомого звена
Рис. 1.12 Классификация кулачковых механизмов по характеру соприкосновения ведомого звена с кулачком
Профилем кулачка называется кривая, полученная в сечении кулачка плоскостью, параллельной плоскости движения кулачка. Профиль кулачка определяет закон движения ведомого звена. При работе кулачкового механизма необходимо, чтобы звенья, входящие в высшую пару, находились в постоянном
соприкосновении, т.е. кинематическая пара должна быть замкнутой. В кулачковых механизмах применяется силовое и кинематическое (геометрическое) замыкание высшей кинематической пары.
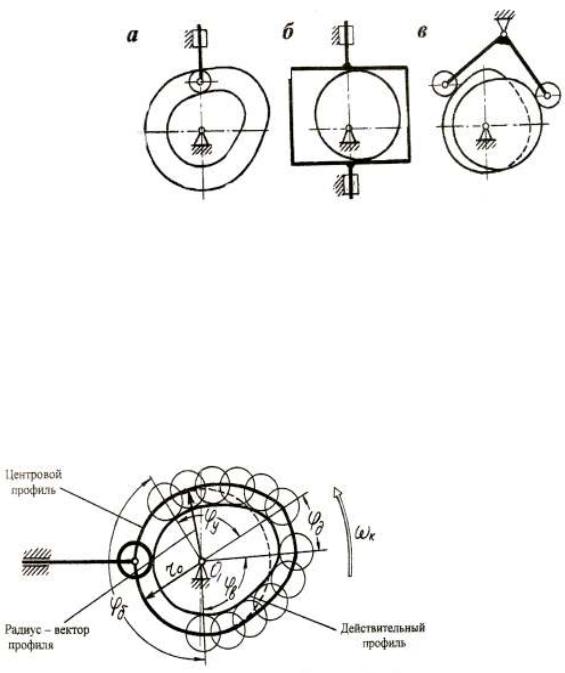
Силовое замыкание осуществляется при помощи сил пружины, тяжести, давления газа или жидкости, которые прижимают толкатель к кулачку. Геометрическое замыкание может иметь различное конструктивное оформление. Например, кулачок может быть изготовлен с пазом, за пределы которого роликовый толкатель выйти не может (рис. 1.13 а). Или толкатель может иметь форму рамки, охватывающей кулачок (рис. 1.13 б). Может применяться двухроликовый толкатель (рис. 1.13 в).
Рис. 1.13 Кулачковые механизмы с геометрическим замыканием
С целью уменьшения износа на толкателе (коромысле) часто устанавливается ролик, свободно вращающийся на оси. В таких случаях необходимо различать два профиля кулачка: центровой 1 и действительный 2. Центровой профиль кулачка представляет собой траекторию центра ролика плоского кулачкового механизма при движении этого ролика относительно кулачка. Действительный профиль - это профиль кулачка, который должен быть изготовлен в металле. Расстояние между центровым профилем кулачка, измеренное по нормали, равно радиусу ролика (рис. 1.14).
Расстояние от оси вращения кулачка до точек центрового профиля называется радиу-
сом - вектором профиля. Окружность минимального радиуса центрового профиля кулачка называется основной,
а её радиус r0 -радиусом Рис. 1.14 Центровой и действительный профиль кулачка основной шайбы.