Материал: 3731

Н = α ; (4.9)

 (k2 −ω2)2 +4n2ω2
(k2 −ω2)2 +4n2ω2
Н- амплитуда колебаний массы.
Основные методы виброзащиты Уменьшение интенсивности колебаний объекта может быть достигнуто не-
сколькими способами.
1 Изменение конструкции объекта.
Устранение резонансных явлений за счет изменения собственных частот объекта.
2 Виброизоляция.
Препятствует связи между источником колебаний и объектом, вибрацию которого необходимо снизить.
3 Динамическое гашение колебаний.
Осуществляется за счет ввода в конструкцию дополнительных устройств
– виброгасителей.
4 Снижение виброактивности источника.
Причина возникновения колебаний может быть связана с трением в кинематических парах. Снижения виброактивнасти в этом случае можно добиться путем применения смазки. Если причиной возникновения колебаний являются движущиеся тела (ротор, перемещающиеся звенья механизма), то снизить интенсивность колебаний можно с помощью уравновешивания движущихся масс.
Уравновешивание вращающихся тел
Задача об уравновешивании вращающихся тел заключается в таком подборе их масс, который обеспечил бы полное или частичное погашение добавочных инерционных давлений на опоры. Вращающееся тело состоит из бесконечно большого числа элементарных масс mi, удаленных на расстояние ri j от оси вращения и на расстояние ai от плоскости, проходящей через центр S масс тела; тогда результирующая сила инерции Ри и результирующий момент Ми всех сил инерции тела относительно плоскости, проходящей через центр S масс:
|
|
|
и = ω 2 ∑mi |
|
|
|
= ω2mrs ; |
(4.10) |
||||
Р |
||||||||||||
|
ri |
|||||||||||
|
|
и= ω 2 ∑mi |
|
ai = ω 2 |
|
ra , |
(4.11) |
|||||
М |
J |
|||||||||||
|
|
ri |
||||||||||
где m- масса всего тела, rs- расстояние центра S масс тела от оси вращения; Jra
- центробежный момент инерции относительно оси вращения и плоскости, перпендикулярной к оси вращения и проходящей через центр масс S тела. При вращении тела угол между векторами Р и и М и сохраняет все время
одно и то же значение α. Тело считается полностью уравновешенным, если ре-
зультирующая сила инерции равна нулю и, следовательно, вращающееся тело не оказывает никаких динамических давлений на опоры.
В этом случае имеем
|
|
|
|
|
= ω 2 ∑mi |
|
|
= 0; |
(4.12) |
||
mrs |
ri |
||||||||||
|
|
|
= ω 2 ∑mi |
|
ai = 0. |
(4.13) |
|||||
Jra |
|||||||||||
ri |
|||||||||||
Условия (4.12) и (4.13) будут удовлетворены только тогда, когда центр масс тела будет лежать на оси вращения, являющейся одной из главных осей инерции. Тело считается уравновешенным статически, если выполняется только условие (4.12), и уравновешенным динамически, если выполняется только условие
(4.13). |
|
Динамическая неуравновешенность, или динамический дисбаланс |
Д |
вращающегося тела измеряется величиной |
|
Д = ∑Gi ri ai [Hм2]. |
(4.14) |
Статическая неуравновешенность, или статический дисбаланс С , харак-
теризующий оставшуюся неуравновешенность, измеряется статическим моментом
С = GrS [Hм], |
(4.15) |
где G- вес вращающегося тела, Н.
Неуравновешенное тело на практике чаще всего уравновешивают при помощи добавочных масс (противовесами). Вращающиеся тела, у которых общая длина значительно меньше их диаметра (шкивы, маховики, зубчатые колеса), имеют незначительные центробежные моменты инерции Jra, поэтому такие тела достаточно уравновесить только статически.
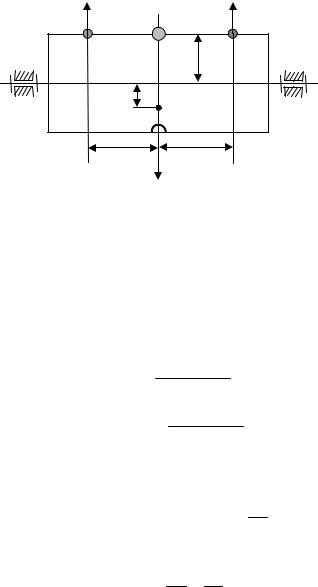
Пусть тело вращения массой m статически не уравновешено (рис. 4.4). Центр масс S данного тела расположен на расстоянии от оси вращения rs. При уравновешивании противовес массой mпр помещают на линии N-N, проходящей через центр тяжести S перпендикулярно оси вращения, и закрепляют грузик с противоположной стороны.
Массу противовеса находим из уравнения |
|
|||
mпр |
= m |
rs |
. |
(4.16) |
|
||||
|
|
r |
|
|
|
|
пр |
|
|
Вместо установки противовеса можно удалить часть массы с противоположной стороны. Величина удаляемой массы должна быть равна массе противовеса.
Если конструктивно установить противовес на линии N-N не удается, можно заменить его на два противовеса массами m1 и m2, расположенных на расстояниях a1 и а2 от линии N-N.
Р1 |
N |
Р2 |
|
||
m1 |
|
mпр m2 |
|
|
rпр |
|
rs |
|
а1 N а2 Ри
Рис. 4.4 Схема уравновешивания вращающегося тела
Массы m1 и m2 определяются из уравнений
mrs=m1rпр+m2 rпр;
m1rпрa1- m2 rпрa2=0,
откуда
m1 = m (rs a2 ) ; rпр a1 + a2
m2 = m rпр (a1 + a2 ) .
Сложив массы этих противовесов, получим
m1 + m2 = m rs = mпр ,
rпр
а из отношения найдем
m1 = a2 . m2 a1
(4.17)
(4.18)
(4.19)
(4.20)
(4.21)
(4.22)
Из приведенных формул следует, что один противовес массой mпр может быть заменен двумя противовесами с массами m1 и m2, расположенными на линии, параллельной оси вращения тела, и подобранными так, чтобы их суммарная масса равнялась массе mпр, а их общий центр масс S совпадал с положением противовеса mпр.
|
ОГЛАВЛЕНИЕ |
|
Раздел 1 Основные понятия ТММ. Структурный анализ и синтез |
|
|
механизмов |
|
3 |
Раздел 2 |
Кинематический анализ и синтез механизмов |
19 |
Раздел 3 |
Кинетостатический анализ механизмов |
26 |
Раздел 4 |
Колебания в механизмах |
32 |
Библиографический список
1.Артоболевский, И.И. Теория механизмов и машин [Текст]: учеб. для втузов // И.И. Артоболевский.- 4-е изд., перераб. и доп. – М.:Наука. 1988. - 640 с.
2.Гончаров, П.Э. Теория механизмов и машин [Текст]: учеб. пособие / П.Э. Гончаров, П.И. Попиков, С.А. Колосов.-Воронеж, 2000. - 139 с.
3.Курсовое проектирование по теории механизмов и машин [Текст] / А.С. Кореняко, Л.И. Кременштейн, С.Д. Петровский, Г.М. Овсиенко, В.Е. Баханов, П.М. Емец.-Киев: Вища школа,1970. - 332 с.
4.Теория механизмов и механика машин [Текст]: учеб. для втузов / К.В. Фролов, С.А. Попов, А.К. Мусатов, Д.М. Лукичев, В.А. Никоноров, Г.А. Тимофеев, А.В. Пуш. -3-е изд., стер.- М.: Высш. шк., 2001. - 496 с.