Материал: 3731
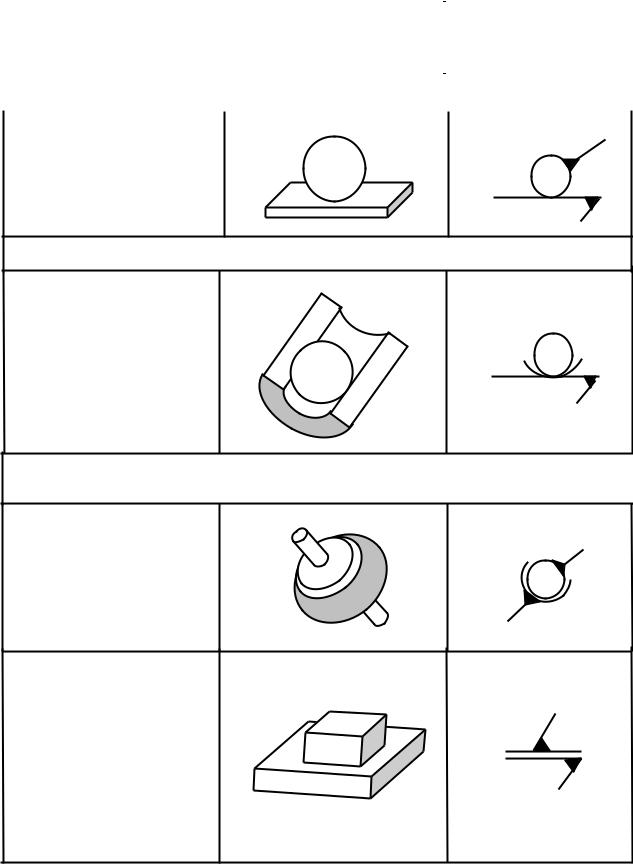
Таблица 1.1 Условное обозначение наиболее распространенных кинематических пар
|
|
Обозначение на |
Наименование |
Внешний вид |
кинематических |
|
|
схемах |
|
Первый класс |
|
|
|
|
Шар - плоскость
Второй класс
Шар - цилиндр
Третий класс
Сферическая
Плоскостная
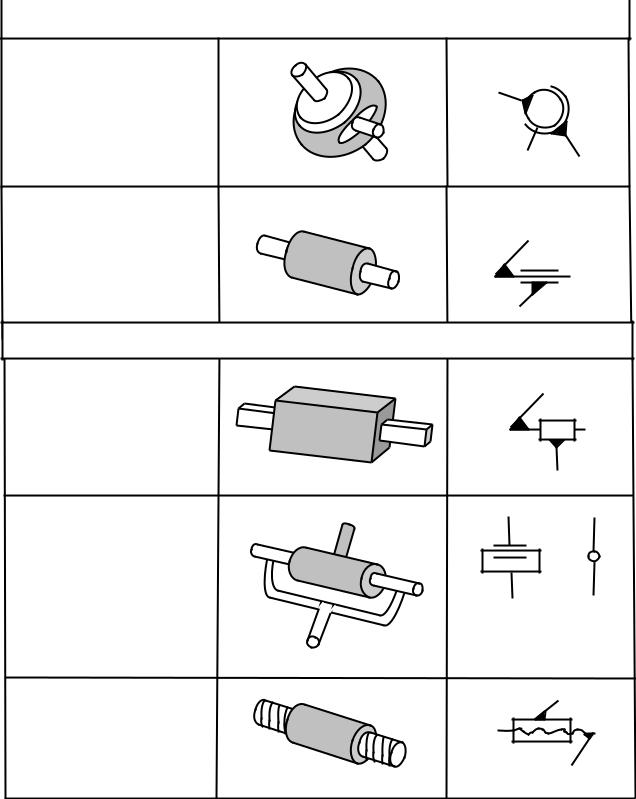
Окончание таблицы 1.1 Условное обозначение наиболее распространенных кинематических пар
Наименование |
Внешний вид |
Обозначение |
|
|
|
Четвертый класс
Сферическая с пальцем
Цилиндрическая
Пятый класс
Поступательная
Вращательная
Винтовая
Структурный анализ механизмов
Кинематическая цепь – это связанная система звеньев, соединенная между собой с образованием кинематических пар. Открытая кинематическая цепь имеет звенья, входящие только в одну кинематическую пару. В том случае, если подобных звеньев нет, то она называется замкнутой кинематической цепью (рис. 1.2). Кинематическое соединение – кинематическая цепь, конструктивно заменяющая кинематическую пару (подшипник качения, соединение шатуна и поршня через поршневой палец).
Рис. 1.2 Схема открытой и замкнутой кинематической цепи
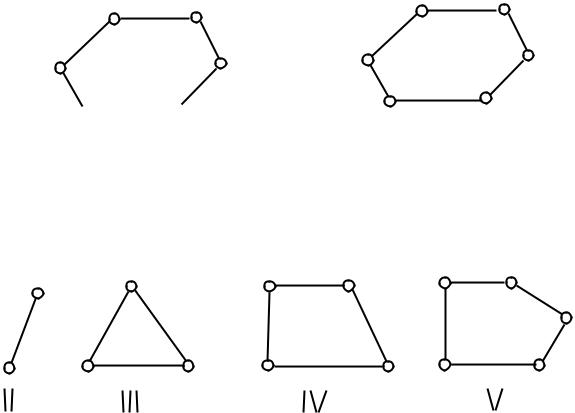
Одно звено либо система могут образовывать замкнутый контур, который не разбивается на более простые.
Класс замкнутого контура определяется числом кинематических пар, его образующих (рис. 1.3).
Рис. 1.3 Замкнутые контуры различных классов
Одной из важнейших характеристик механизма является число степеней подвижности.
Число степеней подвижности (свободы) W показывает, сколько необходимо задать простых входных движений, чтобы охарактеризовать положение любого звена относительно стойки.
Например, число степеней подвижности W=1 показывает, что движения одного входного (ведущего) звена вполне достаточно, чтобы однозначно определить движение всех остальных звеньев механизма.
Степень подвижности пространственных механизмов определяется по формуле Сомова-Малышева
W = 6n − 5p5 − 4p4 − 3p3 − 2p2 − p1 , |
(1.1) |
где n – число подвижных звеньев; p5 – число кинематических пар пятого класса; p4 – число кинематических пар четвертого класса и т.п.
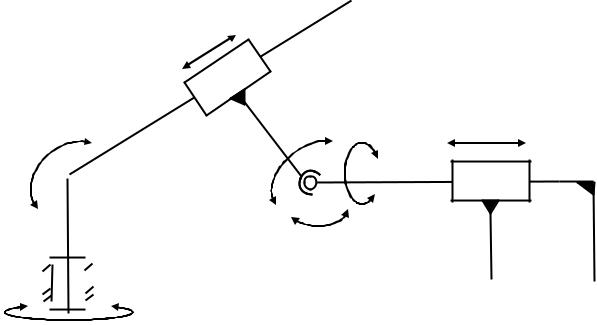
Определим число степеней подвижности пространственного механизма (рис. 1.4).
С
2 |
3 |
Е |
|
||
|
|
4 |
 В
В
D
1
5
0 
 А
А
Рис. 1.4 Кинематическая схема пространственного механизма
Данный механизм содержит пять подвижных звеньев: 1; 2; 3; 4; 5, т.е.
n = 5; четыре кинематические пары пятого класса: А, В, С, Е, таким образом, р5 = 4; одну кинематическую пару третьего класса – D, т.е. р3 = 1; кинематические пары первого, второго и четвертого класса отсутствуют р1 =0, р2 = 0, р4 = 0. Подставив полученные значения в формулу (1.1), получим
W = 6n−5p5 −4p4 −3p3 −2p2 − p1 = 6 5−5 4−4 0−3 1−2 0−0 = 7.
Число степеней свободы W = 7 говорит о том, что необходимо задать семь входных движений, чтобы определить движение всех звеньев механизма.
Число степеней подвижности плоского механизма определяется по формуле П.Л. Чебышева
W = 3n − 2 p5 − p4 или W = 3n − 2 p2 − p1 , |
(1.2) |
где n – количество подвижных звеньев; р5 – количество кинематических пар пятого класса; p4 – количество кинематических пар четвертого класса; р2 – количество низших кинематических пар; р1 – количество высших кинематических пар.
Определим число степеней подвижности плоского механизма (рис. 1.5).
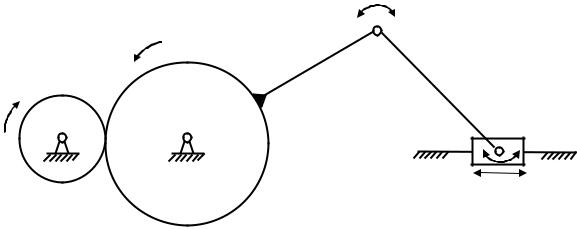
Подвижными звеньями данного механизма являются: зубчатые колеса 1; 2, кривошип 3 и ползун 4. К низшим кинематическим парам относятся вращательные кинематические пары А; С; D; Е; F и поступательная кинематическая пара F, так как их звенья соприкасаются по поверхности. Зубчатые звенья 1 и 2, соприкасаясь по линии, образуют высшую кинематическую пару В. Таким образом, механизм содержит четыре подвижных звена n = 4, одну высшую кинематическую пару р1 = 1 и пять низших кинематических р2 = 5. Подставив полученные значения в формулу (1.2), получим
W = 34 − 2 5 −1=1.
|
|
|
D |
|
|
|
3 |
А |
В |
С |
|
|
|
||
|
|
4 |
|
1 |
|
2 |
|
|
E |
||
|
|
||
|
|
|
|
0 |
|
0 |
0 |
|
|
|
F |
Рис. 1.5 Кинематическая схема плоского механизма
Число степеней подвижности определяет количество элементарных входных движений. Входное движение задает ведущее звено, которое является частью механизма первого класса. Механизм первого класса – ведущее звено, соединенное кинематической парой со стойкой. Таким образом, сколько степеней свободы имеет механизм, столько и механизмов первого класса он должен содержать. При проектировании механизма с заданным количеством степеней свободы необходимо взять столько же механизмов первого класса. Помимо ведущих звеньев механизм может содержать и другие группы звеньев, которые не должны нарушать заданной степени свободы. Такие группы называются группами Ассура.
Группа Ассура – открытая кинематическая цепь, которая при присоединении к механизму не изменяет его числа степеней свободы.
Если группу Ассура присоединить свободными элементами звеньев к стойке, то она станет неподвижной(W=0).
Любой механизм можно представить как совокупность некоторого количества механизмов первого класса и некоторого количества групп Ассура. Для того чтобы выполнялось условие W=0, количество звеньев в группе Ассура должно составлять 2/3 от количества низших кинематических пар: