Материал: 3731
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ВОРОНЕЖСКАЯ ГОСУДАРСТВЕННАЯ ЛЕСОТЕХНИЧЕСКАЯ АКАДЕМИЯ
М.В. ДРАПАЛЮК Л.Д. БУХТОЯРОВ
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
ТЕКСТЫ ЛЕКЦИЙ
Воронеж 2006
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ВОРОНЕЖСКАЯ ГОСУДАРСТВЕННАЯ ЛЕСОТЕХНИЧЕСКАЯ АКАДЕМИЯ
М.В. ДРАПАЛЮК Л.Д. БУХТОЯРОВ
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
ТЕКСТЫ ЛЕКЦИЙ
Воронеж 2006

УДК 621.01 Д 72
Драпалюк, М.В. Теория механизмов и машин [Текст]: тексты лекций / М.В. Драпалюк, Л.Д. Бухтояров, 2006 - 40 с.
Даны основные определения курса ТММ. Рассмотрен кинематический анализ и синтез механизмов на основе графических и графоаналитических методов. Представлен кинетостатический анализ механизма.
Отдельный раздел посвящен колебаниям в механизмах и различным способам их гашения.
Тексты лекций рассчитаны на студентов 250301 – Лесоинженерное дело, изучающих дисциплину «Теория машин и механизмов»
Ил.37. Библиогр.:5 наим.
Печатается по решению редакционно-издательского совета ВГЛТА
Рецензенты:
-кандидат техн. наук, доц. кафедры тракторов и автомобилей ВГАУ, О.М. Костиков О.М.;
-кафедра прикладной механики ВГАУ
Научный редактор проф. И.М. Бартенев
УДК 621.01
СДрапалюк М.В., Бухтояров Л.Д., 2006
ISBN |
С |
Воронежская государственная |
|
лесотехническая академия, 2006 |
|
|
|
РАЗДЕЛ 1 ОСНОВНЫЕ ПОНЯТИЯ ТММ. СТРУКТУРНЫЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Основные определения курса ТММ
Теория машин и механизмов (ТММ) представляет собой науку, состоящую из двух основных частей:
1 Теория механизмов изучает структуру, кинематику и динамику механизмов в связи с их анализом и синтезом.
Анализ – исследование свойств механизмов.
Синтез – проектирование механизмов с заданными свойствами.
2 Теория машин изучает совокупность взаимно связанных механизмов, которая образует машину или систему машин.
Машина – устройство, преобразующее энергию, материалы или информацию в целях облегчения труда человека.
В зависимости от выполняемых функций машины могут быть: энергетическими - преобразуют энергию в механическое движение (дви-
гатель) или наоборот (генератор); рабочими – преобразуют материалы. Если преобразование материала за-
ключается только в его перемещении, то такая рабочая машина называется транспортной. Если преобразуется форма или свойства материала, то машина называется технологической.
Контрольно–управляющие машины преобразуют информацию от кон- трольно-измерительных приборов с целью управления энергетической или рабочей машиной.
Математические машины преобразуют информацию, заданную в виде чисел или алгоритмов.
Кибернетические машины имитируют механические, биологические и другие процессы, присущие живой природе, в частности человеку (искусственное сердце, почки).
Машинный агрегат – развитое устройство, состоящее из двигателя, передаточных механизмов, рабочей машины, контрольно-управляющих машин.
Механизм – система тел, предназначенная для преобразования движения одного или нескольких тел в требуемое движение других тел.
Механизм может быть плоским, если точки его звеньев движутся в одной плоскости, либо в параллельных плоскостях. Если это условие не соблюдается, то механизм называется пространственным.
Каждый механизм состоит из отдельных деталей.
Деталь – простейшая часть машины, механизма или прибора выполненная без применения сборочных операций.
Звено – деталь или совокупность деталей, не имеющих относительного движения между собой.
Звенья бывают подвижными и неподвижными. Неподвижное звено в механизме всегда только одно и называется стойкой.
Подвижные звенья в механизме имеют определенные названия в зависимости от характера движения и расположения их в схеме. В рычажных механизмах наиболее часто встречаются следующие звенья:
кривошип – звено, совершающее полный оборот вокруг неподвижной оси; коромысло – звено, совершающее неполный оборот вокруг неподвижной оси; шатун – звено, не имеющее общих кинематических пар со стойкой; ползун – звено, входящее в поступательную кинематическую пару с на-
правляющей; кулиса – подвижная направляющая.
Подвижные звенья соединяются между собой или со стойкой с возможностью движения одного звена относительно другого.
Кинематическая пара – подвижное соединение двух соприкасающихся звеньев.
Кинематические пары делятся на классы. Класс кинематической пары определяется числом условий связи. Под условием связи понимается невозможность какого-либо элементарного движения.
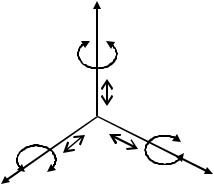
Считается, что любое тело в пространстве может совершать шесть элементарных движений вдоль осей Х; У; Z и вокруг этих осей (рис. 1.1).
Если рассматривать кинематическую Z пару, то соединение звеньев будет накладывать ограничение на их взаимное перемещение. Сколько элементарных движений становится невозможно, столько условий связи, та-
ков и класс пары (табл. 1.1). Элемент звена – совокупность по-
Y |
X |
верхностей, поверхность, линия или |
|
точка, по которой звено соприкасает- |
|
|
|
|
|
|
ся с другим звеном, образуя кинема- |
|
|
тическую пару. |
Высшая кинематическая пара – такое подвижное соединение, где звенья соприкасаются в точке либо по линии.
Высшие кинематические пары образуются при соединении двух зубчатых колес, шара или цилиндра с плоскостью, кулачка с толкателем и т.п.
Низшая кинематическая пара – такое подвижное соединение, где звенья соприкасаются по поверхности.
Низшими кинематическими парами являются соединение ползуна с направляющей (поступательная пара), вращательная пара (цилиндрический шарнир), где звенья соприкасаются по цилиндрической поверхности и т.п.