Материал: 2518
Расходомер РПЛ-1 (СКБ НПО «Геотехника») с поворотной лопастью относится к расходомерам обтекания. Расходомер включает датчик и пульт. Датчик монтируется в горизонтальном положении в разрыв нагнетательной линии.
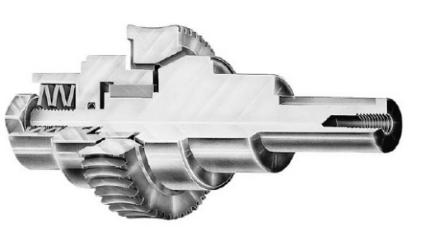
Датчик (рис. 2.30) включает трубопровод 1 и лопасть 2, закрепленную на упругой подвеске 3, и индуктивный преобразователь с магнитопроводом 5 и катушками 6, расположенный с внешней стороны корпуса 4 напротив лопасти. Трубопровод и корпус датчика выполнены из нержавеющей неферромагнитной стали, лопасть – из нержавеющей ферромагнитной стали.
Под действием потока жидкости лопасть отклоняется на соответствующий угол , являющийся мерой расхода жидкости. Противодействующей силой является вес лопасти и упругие силы подвески. Лопасть исполняет роль сердечника индуктивного преобразователя,
взаимодействуя с преобразователем через неферромагнитную стенку 8. |
|||||||||||||||||
С поворотом лопасти изменяется рабочая площадь индуктивного дат- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
чика, что, в свою очередь, ведет к изменению выходного сигнала на- |
|||||||||||||||||
пряжения датчика. |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Выпрямленный сигнал датчика подается на электроизмеритель- |
|||||||||||||||
ный прибор – микроамперметр М325, проградуированный в единицах |
|||||||||||||||||
расхода л/мин. В схему измерителя введенДпереключатель с рядом рези- |
|||||||||||||||||
сторов, которые включаются последовательно с измерительным прибо- |
|||||||||||||||||
ром. Чем больше плотность жидкости, тем на больший угол отклоняет- |
|||||||||||||||||
ся лопасть, больше разбаланс схемы, т.е. и показания прибора при не- |
|||||||||||||||||
изменном расходе жидкости. Следовательно, с увеличением плотности |
|||||||||||||||||
|
|
|
|
|
|
|
А |
|
|
|
|
||||||
жидкости в цепь вводится резистор сбольшим сопротивлением. |
|||||||||||||||||
|
|
б |
|
|
|
|
|
|
7 |
||||||||
4 |
3 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
и |
|
|
|
|
|
|
|
||||||||
|
|
5 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
1 |
|
6 |
2 |
|||||||||||
|
|
|
|
Рис. 2.30. Общий вид датчика расходомера РПЛ-1: |
|||||||||||||
С1 – трубопровод; 2 – лопасть; 3 – упругая подвеска; 4 – корпус; 5 – магнитопровод; |
|||||||||||||||||
6 – катушки; 7 – штепсельный разъем; 8 – стенка
71
Измерители и ограничители крутящего момента. Крутящий момент является важным параметром процесса бурения. Контроль крутящего момента на шпинделе (роторе) бурового станка дает возможность:
контролировать загрузку бурового инструмента в наиболее опасном верхнем сечении;
судить о загрузке привода и бурового станка, состоянии скважины (зашламование, вывалы), о резких искривлениях ствола, о смене пород, о степени износа породоразрушающего инструмента;
избежать ряда осложнений и аварий в процессе бурения. |
||||||
Ограничитель крутящего момента STM (рис. 2.31) применя- |
||||||
он вмонтирован без изменения размеров в одноступенчатые |
||||||
|
|
|
|
|
|
И |
червячные редукторы RI/RMI, двухступенчатые червячные редукторы |
||||||
CRI/CRMI и цилиндрочервячные редукторы CR/CB во всем диапазо- |
||||||
не габаритов: 28, 40, 50, 63, 70, 85, 110, 130, 150; |
|
|||||
он защищен от воздействия внешней неблагоприятной среды |
||||||
(вода, пыль, масло, смазка и др.); |
|
Д |
||||
|
применение картерной |
|
смазки позволяет повысить срок |
|||
службы и надежность; |
|
|
|
|
||
|
простота регулировки |
(посредством единственной шести- |
||||
гранной гайки); |
|
А |
|
|||
|
|
|
|
|||
может проскальзывать в течение нескольких минут, не выхо- |
||||||
дя из строя. |
б |
|
|
|||
|
|
|
|
|||
Си |
|
|
|
|
||
Рис. 2.31. Внешний вид ограничителя крутящего момента STM
72
При использовании для привода буровых станков асинхронного привода и жесткой кинематической цепи крутящий момент может быть определен косвенным путем по величине потребляемой электродвигателем активной мощности и частоте вращения шпинделя.
Mш |
60PЭ д р |
; |
(2.6) |
|
|||
|
2 nш |
И |
|
|
|
||
PЭ = 3U·I·cos , |
(2.7) |
||
где Mш – крутящий момент на шпинделе, Нм; PЭ – активная электриче-
ская мощность двигателя, Вт; n – частота вращения шпинделя,
об/мин; U – фазное напряжение обмотки двигателя, В; I – ток обмотки
двигателя, А; cos – коэффициент мощности двигателя; ηд – КПД двигателя; ηр – КПД редуктора бурового станка.
Для измерения крутящего момента на шпинделе, считая элек-
тродвигатель симметричнойАнагрузкой, требуются датчик напряжения и датчик тока, включенные в одну из фаз электродвигателя; необходимо учесть конкретные частоты вращения шпинделя и затраты мощ-
ности для приведения в действие силовой кинематики самого станка (затраты мощности на холостое вращение).
Аппаратура ОМ40 предназначена для оснащения станков ЗИФ-650М и ЗИФ-1200 с приводом от асинхронного электродвигате-
ш Д
АппаратурабОМ40 обеспечивает при бурении измерение крутящего момента на шпинделе, световую предупредительную (мигающую) сигнализацию при перегрузке (первая ступень защиты) и автоматическое ограничение крутящего момента (вторая ступень защиты) путем приподъема снаряда и отключения электродвигателя станка. При спускоподъемных операциях ОМ40 обеспечивает измерение усилия на крюке, световую сигнализацию при перегрузке талевой системы (первая ступень защиты), автоматическое ограничение усилия
ля и имеющих ступенчатую коробку перемены передач.
(вторая ступень защиты).
Аппаратуру ОМ40 по выполняемым функциям можно разделить
на отдельные блоки: |
|
иизмерительный блок; |
|
|
блок сигнализации перегрузки; |
|
блок автоматического ограничения; |
|
блок питания; |
|
блок гидравлической защиты – исполнительный механизм |
Сприбора для случая воздействия прибора на подъем шпинделя буро- |
|
вого станка.
73
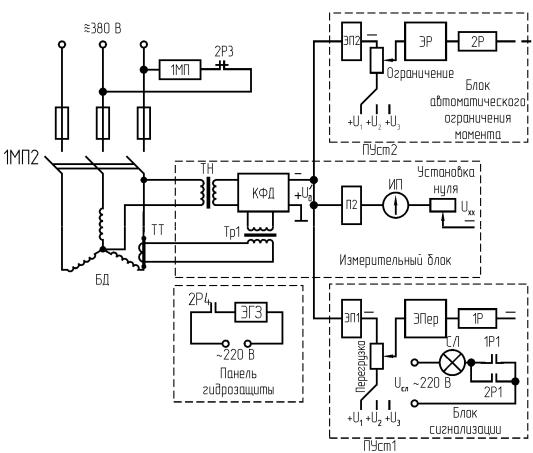
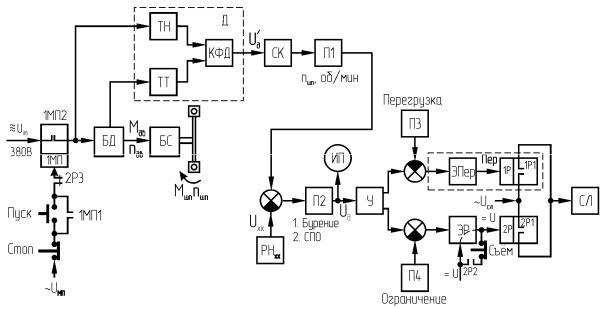
На рис. 2.32 показана принципиальная электрическая схема, а на рис. 2.33 – структурная блок-схема аппаратуры ОМ40.
Согласно принципиальной электрической схеме трансформатор напряжения ТН и трансформатор тока ТТ включены на одну фазу двигателя. Квадратичный фазочувствительный детектор КФД выдает
тивной мощности на шпинделе. Чтобы сохранить неизменным диапазон измерения при изменении частоты вращения шпинделя, переключатель П1 (см. рис. 2.33) переводится в соответствующее положение 87, 118, …, 800 об/мин, и сигнал делится таким образом, что при од-
выходной сигнал напряжения U′д, пропорциональныйИзначению ак-
ном и том же значении крутящего моментаДна любой частоте вращения на измерительный прибор подается одно и то же напряжение.
Сигнал детектора U′д подается на операционный усилитель согласующего каскада СК, где сравнивается с сигналом, соответствующим моменту холостого вращения шпинделя бурового станка Uхх, и далее индицируется измерительным показывающим прибором ИП.
Для переключения контроля момента на шпинделе и нагрузки на крюке талевой системы при спускоподъемных операциях имеется переключатель П2.
С
Рис. 2.32. Принципиальная электрическая схема аппаратуры ОМ40
74
Блок сигнализации перегрузки осуществляет сравнение сигнала, поступающего от измерительного блока, с сигналом, заданным переключателем П3 (см. рис. 2.33). При превышении сигналом заданной величины включается световая мигающая сигнализация (работа реле 1Р, которое включает и выключает питание сигнальной лампы СЛ). Это происходит как при перегрузке по моменту во время процесса бурения, так и при перегрузке во время подъема бурового снаряда.
Рис.б2.33. Структурная блок-схема аппаратуры ОМ40
иБлок автоматического ограничения момента осуществляет срав-
нение сигнала, поступающего от измерительного блока, с заданной переключателем П4 величиной ограничения, например, 1,5 кНм. При превышении сигнала задания срабатывает реле 2Р. Контакт 2Р3 раз- Срывает цепь питания катушки магнитного пускателя 1МП электродвигателя бурового станка (см. рис. 2.32), и электродвигатель отключается. Контакт 2Р4 включает электрогидрораспределитель панели электрогидравлической защиты ЭГЗ (см. рис. 2.32), и золотник панели переключает гидросистему бурового станка на подъем шпинделя вместе с буровым инструментом. Контактом 2Р1 включается на постоянное свечение лампа СЛ. Возврат схемы автоматического ограничения момента в исходное положение осуществляется при нажатии на кнопку «Съем», которая включена последовательно с контактом 2Р2 (размыкание цепи питания реле 2Р). Возврат схемы в исходное положение возможен только после снижения крутящего момента до нор-
мального уровня (ниже значения задания).
75