Материал: 2426
Применение видеорегистрации и лазерного сканирования рабочей зоны, оборудования ГПК и груза (рис. 1.3), а также одновременное использование уже разработанных и действующих систем и технологий технического (компьютерного) зрения, создания на их основе цифровых 3D-моделей объектов архитектуры и строительства позволяет создать цифровые модели рабочей области с препятствиями, звеньев оборудования и объемного тела груза, отслеживать изменения их взаимного расположения в реальном времени рабочего процесса
[29, 30, 47, 73, 165, 168, 182, 239].
Лазерный 3D-сканер – это прибор, оснащенный высокоскоростным безотражательным лазерным дальномером и системой изменения направления луча лазера – специальным поворотным зеркалом. Лазерные 3D-сканеры принадлежат к категории активных систем сканирования. Они автоматически пульсирующим лучом лазера сканируют определенную область окружающего пространства и фиксируют время, затрачиваемое световым лучем на преодоление двойного расстояния от лазера до сканируемой поверхности (аналогичный принцип используется в радиолокационных установках) [26, 29, 73, 168, 172, 239].
Внастоящее время подобные приборы находят широкое примерение во многих отраслях промышленности, геодезии, строительства
ипр.; применяются для съемки и изучения горного месторождения или карьера в маркшейдерском и горном деле, для создания точных моделей существующих объектов реконструкции в строительстве и архитектуре, получения цифровых 3D-моделей элементов конструкций при выполнении съемок на промышленных предприятиях и во внутрицеховых помещениях [26, 29, 73, 168, 172, 214 , 239].
Вперспективе возможно применение аналогичных приборов на ГПК для создания цифровой модели пространства рабочей области с препятствиями, рабочего оборудования ГПК и объемного объектагруза в режиме реального времени.
Преимущества наземного лазерного сканирования перед конкурирующими технологиями оцифровки объектов трехмерного про-
странства [29, 134, 168, 172, 214]:
- трехмерная модель объекта при невысокой плотности точек сканирования формируется очень быстро, т.е., в перспективе, в реальном времени;
- очень высокая точность измерений; - безопасность съемки опасных и труднодоступных объектов; - беспроводная Wi-Fi связь с ПК.
15
Пределы заявленных технологических возможностей существующих лазерных 3D-сканеров на текущий момент следующие [29, 134, 168, 172]:
-плотность точек лазерного сканирования может составлять от 0,25 мм до 1 м и более;
-обзорность сканеров может составлять максимально до 360° по горизонтали и до 300° по вертикали;
-скорость сканирования составляет в наиболее производительных моделях до 625000 точек в секунду;
-дальность сканирования от 1 м до 2 км (максимально в ряде моделей);
-погрешность определения координат точки по любой из трех
осей неподвижной системы координат пространства (X0, Y0, Z0) – не более 6 мм при расстоянии до объекта менее 50 м и не более 50 мм при расстоянии до 2 км;
-полное время сканирования составляет от несольких секунд до нескольких минут (до 3 мин сканирования полной панорамы окружающего пространства в скоростных моделях сканеров при средней плотности сканирования) в зависимости от размеров сканируемого пространства и степени детализации. Детализация данных в моделях 3D-сканеров с расширенным функционалом регулируется несколькими режимами плотности сканирования. Максимальная производительность достигается выбором между более высоким разрешением и более скоростной съемкой.
Происходит довольно быстрое и постоянное совершенствование 3D-сканеров, расширение их технологических возможностей, повышение показателей эффективности, а также снижение их стоимости.
В результате 3D-сканирования формируется массив (т.н. облако) не связанных между собой точек (point cloud), каждая из которых имеет 3 пространственные координаты в неподвижной системе
O0X0Y0Z0 и, в ряде моделей 3D-сканеров информацию о псевдоцвете. Обычно результаты сканирования при помощи специальной про-
граммы обработки сканирования преобразуются из облака точек в полигональные 3D-модели поверхностей (операция «реконструкции поверхности», surface reconstruction). Однако, для задач автоматизации перемещения грузов ГПК в сложноорганизованном трехмерном пространстве формирование из облака точек полигональных моделей поверхностей, занимающее значительное время и требующее больших вычислительных затрат, представляется нецелесообразным и излишним.
16
|
Пуск |
1 |
2 |
|
|
|
|
Ввод исходных данных: |
|||
Ms(i1,j1), i1 [1; iскан]; |
j1 [1; 3]; |
||
|
ymin; l |
|
|
|
i |
|
3 |
|
i=1;i≤jmax;i=i+1 |
|
|
|
k |
|
4 |
|
|
|
|
|
k=1;k≤kmax;k=k+1 |
5 |
|
|
|
|
|
|
YПР(i,k)=ymin |
|
|
|
|
6 |
|
|
k |
|
|
|
|
|
|
|
i |
|
7 |
|
|
|
|
|
i1 |
|
8 |
|
|
|
|
|
i1=1;i1≤iскан;i1=i1+1 |
|
|
|
|
|
9 |
|
i = ëMs(i1, 1) |
lû; |
|
|
|
||
|
k = ëMs(i1, 3) lû |
|
|
|
(i<imax) |
10 |
Нет |
|
(k<kmax) |
|
|
|
Да |
11 |
Нет |
|
|
||
|
Ms(i1,2)>YПР(i,k) |
|
|
|
Да |
|
12 |
|
YПР (i, k)=Ms(i1,2) |
||
|
i1 |
|
13 |
|
|
|
|
|
|
|
14 |
Вывод результатов:
YПР
Останов 15
а)
Пуск |
1 |
2 |
Ввод исходных данных: |
|
|
Ms(i1,j1), i1 [1; iскан]; |
j1 [1; 3]; |
|
l |
|
|
i3
i=1;i≤ imax;i=i+1
j4
j=1;j≤ jmax;j=j+1
k 5 k=1;k≤kmax;k=k+1
|
6 |
|
Vox(i, j, k)=0 |
||
|
k |
7 |
|
j8 i 9
i1 10 i1=1;i1≤iскан;i1=i1+1
i = ëMs(i1, 1) lû; 11
lû; 11
j= ëMs(i1, 2) lû;
lû;
k= ëMs(i1, 3) lû
lû
12 (i<imax) Нет
(j<jmax) (k<kmax)
Да 13
Vox(i, j, k)=1
i1 |
14 |
|
15 |
Вывод результатов:
Vox
Останов 16
б)
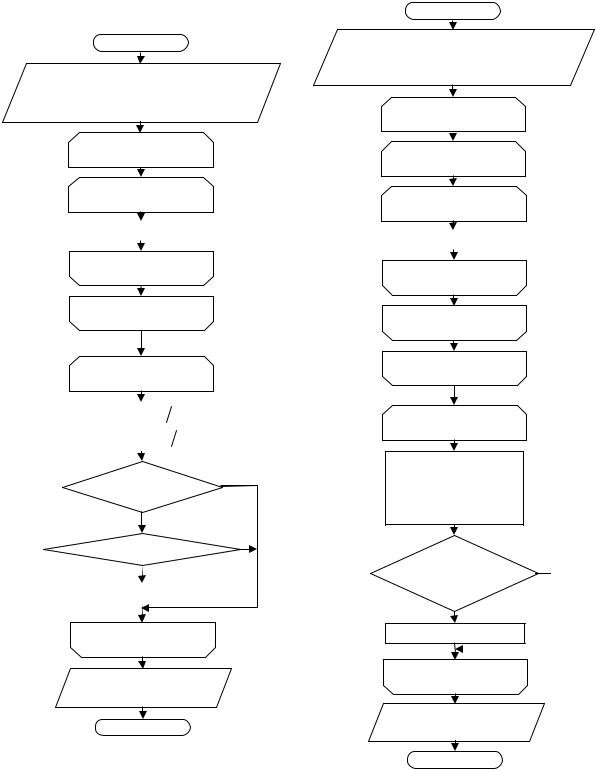
Рис. 1.4. Блок-схемы алгоритмов преобразования облака точек результатов лазерного сканирования: в матрицу поля высот препятствий (а) и в воксельную модель пространства (б)
Для планирования траекторий перемещения ГПК объемных объ- ектов-грузов в среде с препятствиями последнюю удобнее всего
17
представлять в виде воксельной модели или даже при принятии определенных допущений в виде матрицы поля максимальных высот препятствий, занимающей на порядок меньше места в памяти ПК. Известны работы по преобразованию облака точек в 3D-модели городской среды [223].
Однако для анализируемой проблемы оптимизации траектории груза ГПК не требуется столь высокая степень детализации пространственных данных. Шаг дискретизации воксельной модели или сетки поля высот препятствий рабочей области l, учитывая значительные размеры последней (диаметр рабочей области может составлять до нескольких десятков метров в зависимости от марки, конструкции и типоразмера ГПК) и перемещаемых грузов, может быть принят относительно крупным, порядка 10–1 м.
Для преобразования результатов лазерного сканирования (облака точек) в воксельную модель либо матрицу поля высот препятствий предлагается использовать достаточно простые и в то же время эффективные алгоритмы, представленные на рис. 1.4.
В блок-схемах предложенных алгоритмов использованы следующие условные обозначения: Ms – матрица результатов лазерного сканирования (координат облака точек) размером [iскан×3]; iскан – общее число точек облака отдельного сканирования; YПР (i, k) – отдельный элемент матрицы поля высот препятствий [YПР] с индексами i, k, задающими положение точки поля по двум горизонтальным осям (X0, Z0 соответственно) неподвижной системы координат O0X0Y0Z0 с шагом l; Vox(i, j, k) – отдельный элемент массива воксельной модели пространства с индексами i, j, k, задающими положение точек пространства по осям X0, Y0, Z0 соответственно неподвижной системы координат O0X0Y0Z0 с шагом l; ymin – определенное начальное значение элементов матрицы поля высот препятствий [YПР].
Реализация беспроводного автоматического считывания информации посредством технологий Wi-Fi, Bluetooth и модемов типа GSM/GPRS по сетям мобильной сотовой связи позволит осуществлять, в том числе дистанционно, управление совмещенным рабочим процессом двух или нескольких ГПК, перемещающих общий груз.
Таким образом, для полного выполнения п. 4) условий комплексной автоматизации ГПК (стр. 11) [151] дополнительно необходимо осуществить:
1) глобальное позиционирование движущихся элементов оборудования ГПК и груза в реальном времени с использованием системы
GPS/GLONASS;
18
2)видеорегистрацию и/или лазерное сканирование рабочей зоны
спрепятствиями, оборудования ГПК и груза с использованием лазерных наземных 3D-сканеров;
3)оцифровку результатов видеорегистрации и/или лазерного сканирования рабочей зоны с препятствиями и груза и создание моделей пространства по предложенным алгоритмам преобразования облака точек (см. рис. 1.4).
Все предпосылки для выполнения перечисленных выше дополнительных условий в настоящее время сформированы.
Для выполнения п. 3 условий комплексной автоматизации ГПК (стр. 11) в настоящее время разработаны многочисленные методики и алгоритмы для обеспечения движения ГПК груза по заданной траектории. Они позволяют автоматически стабилизировать положение груза и управлять его движением, т.е. осуществлять «отработку» заданной траектории, в том числе при наличии случайных возмущающих воздействий. Используются такие приемы, как применение специальных схем подвеса, различных стабилизационных платформ, жесткого подвеса, стабилизация движения при помощи управляющих алгоритмов систем автоматического управления на основе традиционной булевой и нечеткой логики и др. [6, 17, 48, 144, 145, 179, 200].
Синтезирование управляющих воздействий методами нечеткой логики позволяет в автоматическом режиме стабилизировать траекторию перемещения груза и ограничивать амплитуду раскачивания грузового каната ГПК.
Таким образом, в настоящее время уже сложилась поэлементная техническая база для комплексной автоматизации ГПК, которая применяется в рассматриваемой и смежных отраслях. Наиболее проблемным, «узким местом» при решении задачи комплексной автоматизации ГПК является разработка методик и алгоритмов оптимизации траектории перемещения ГПК объемного объекта-груза произвольной заданной формы с учетом произвольной формы и расположения препятствий в рабочей области.
1.2.Обзор существующих САПР с функциями планирования
иоптимизации траектории объектов
Функции автоматизированного планирования и/или оптимизации траектории движения объектов (планирования и/или оптимизации пу-
19