Материал: 2426
перемещения грузов бортового устройства управления на базе микропроцессоров или ПЭВМ.
На производительность и эффективность работ по перемещению грузов ГПК оказывает влияние большое количество факторов. Одним из основных влияющих факторов является выбор траектории перемещения груза [42].
При перемещении груза ГПК могут иметь место ситуации, когда между начальным и конечным целевым положениями груза присутствуют препятствия различной формы и размеров (сложноорганизованное трехмерное пространство). В этом случае возможен обход препятствий поднятием груза над ними либо сбоку в горизонтальном направлении без поднятия, если высота препятствий достаточно велика, или они непреодолимы по высоте для данной конструкции ГПК, или данная зона является запрещенной для движения грузов над ней. Возможны также комбинированные варианты перемещения. Из этого вытекает актуальность управления грузом, перемещаемым ГПК, в трех координатах пространства [178].
Для выполнения при помощи ГПК некоторых видов монтажных, строительных и реконструкционных работ в условиях стесненной городской застройки и производственных сооружений необходима жесткая отработка определенной траектории [178].
Оптимизация траектории перемещения груза наиболее эффективно может быть осуществлена при использовании на ГПК систем автоматического управления.
Все перечисленное обуславливает целесообразность планирования, оптимизации и контроля траектории перемещаемого объектагруза путем совершенствования систем управления ГПК, расширения их функциональных возможностей. Задача оптимизации траектории перемещаемого груза сводится к планированию оптимальной траектории грузозахватного устройства ГПК. Траектория движения объек- та-груза может планироваться с учетом различных критериев оптимальности, таких как минимум геометрических перемещений и связанный с ним минимум временных затрат, минимум затраченной работы, сохранение устойчивости ГПК и др. Однако в любом случае наличие препятствий определенной геометрической формы и размеров обуславливает геометрический характер решаемых задач.
В настоящее время управление такой довольно сложной и громоздкой комплексной системой, как ГПК, состоящей из механической, гидравлической, электрической подсистем, осуществляется вручную на всех известных марках ГПК различных производителей.
10
Устанавливаемые в обязательном порядке на все самоходные стреловые ГПК, эксплуатирующиеся в Российской Федерации, приборы безопасности и регистраторы параметров работы способны в лучшем случае лишь автоматически отключать механизмы подъема груза и изменения вылета в случае подъема груза, масса которого превышает грузоподъемность ГПК для данного вылета, либо обеспечивать т.н. координатную защиту, также блокировкой приводов, при приближении звеньев крана к недопустимым областям пространства или ЛЭП
[49, 50, 150, 176, 177].
Развитие и совершенствование автоматизированных систем управления ГПК позволит перемещать груз по оптимальной траектории, обеспечивая минимизацию расстояния (а следовательно, повышение производительности, снижение энергетических и стоимостных затрат) и одновременно плавность перемещения (ограничение первых двух производных по времени: скорости и ускорения) [75, 151, 178].
При декомпозиции рассматриваемой задачи оптимизации траектории груза, перемещаемого ГПК, могут быть выделены следующие две основные подзадачи:
1)построение плана оптимальной траектории перемещения ГПК груза в неоднородном организованном пространстве;
2)синтезирование функций управления приводами, обеспечивающих движение рабочего органа ГПК и груза по сформированному плану траектории.
Обе описанные подзадачи могут быть решены последовательно, т.е. в различные моменты времени, при этом первая подзадача к тому же, учитывая сравнительно небольшие скорости перемещения грузов ГПК, может быть решена полностью независимо от второй.
Для комплексной автоматизации ГПК необходимы следующие основные компоненты системы автоматического управления [151]:
1)рабочее оборудование (механическая система, гидравлический привод) и электрические устройства;
2)методики, алгоритмы и программное обеспечение для планировщика оптимальной траектории перемещения груза с учетом препятствий;
3)методики, алгоритмы и программное обеспечение для управления и контроля движением («отработка» спланированной траектории);
4)датчики и системы получения информации об изменяющемся рабочем пространстве и текущем положении груза для реализация обратной связи.
11

Пункты № 1 и частично № 4 уже присутствуют в виде самого ГПК, его приводов и приборов безопасности, в комплект которых входит ряд датчиков, регистрирующих параметры ГПК в течение всего рабочего цикла.
При этом необходимо отметить, что перспективными направлениями развития и совершенствования уже использующихся приборов безопасности и регистраторов параметров ГПК в настоящее время яв-
ляются [47, 75, 76, 189]:
-увеличение числа регистрируемых параметров;
-оснащение ГПК устройствами беспроводной передачи данных типа Wi-Fi, Bluetooth, а также модемами типа GSM/GPRS с выходом в Интернет по сетям мобильной сотовой связи;
-оснащение ГПК бортовыми приемниками спутниковых сигна-
лов GPS/GLONASS;
-применение видеорегистрации (как вариант – лазерного сканирования) рабочей зоны, оборудования ГПК и груза.
В перспективе это должно привести к интеграции многофункциональных микропроцессорных приборов и систем безопасности с системами управления ГПК [75, 76, 189].
а) |
б) |
в) |
Рис. 1.1. Приборы безопасности, используемые на ГПК: а – блок индикации ОГМ240 в кабине крановщика; б – ОНК-140С с комплектом датчиков; в – блок индикации ОНК-160С в кабине крановщика
Используемые в настоящее время в обязательном порядке на стреловых самоходных ГПК системы безопасности типов ОНК-140С, ОНК-160С и ОГМ240 (рис. 1.1) на микропроцессорах, согласно Правилам ПБ 10-382-00, производят регистрацию следующего минимального набора параметров: угла наклона стрелы, длины стрелы, угла поворотной платформы, давлений в поршневой и штоковой полостях гидроцилиндра подъема стрелы [129, 170, 176, 177].
12
На основе измеренных значений перечисленных параметров вычисляется ряд других: фактические масса груза, вылет, грузовой момент [129, 170, 176, 177], которые выводятся на панель блока отображения индикации.
Перспективное оснащение ГПК бортовыми приемниками спутниковых сигналов GPS/GLONASS открывает возможность для глобального спутникового позиционирования, т.е. пространственного (3D) контроля положения звеньев и груза ГПК с высокой точностью в реальном времени. Подобные системы уже широко используются на различных видах строительной, дорожной, горной и сельскохозяйственной техники (автогрейдерах, бульдозерах, экскаваторах, катках, фронтальных колесных погрузчиках и др.) [20, 53, 183, 198, 250].
При одновременном с системой глобального позиционирования GPS/GLONASS использовании сигналов, полученных через модем типа GSM/GPRS, данная система может захватывать корректирующий сигнал с помощью сотовой связи от сети постоянно действующих опорных станций GPS+. В этом случае отпадает необходимость в использовании базовой станции GPS+, специально устанавливаемой неподвижно вне машины. В зависимости от степени усложнения данной технологии (применение дополнительных инерциальных и др. датчиков, алгоритмов вычислительной обработки сигналов) точность позиционирования (погрешность определения координат) составляет от 2–3 см до 1–6 мм [198, 250].
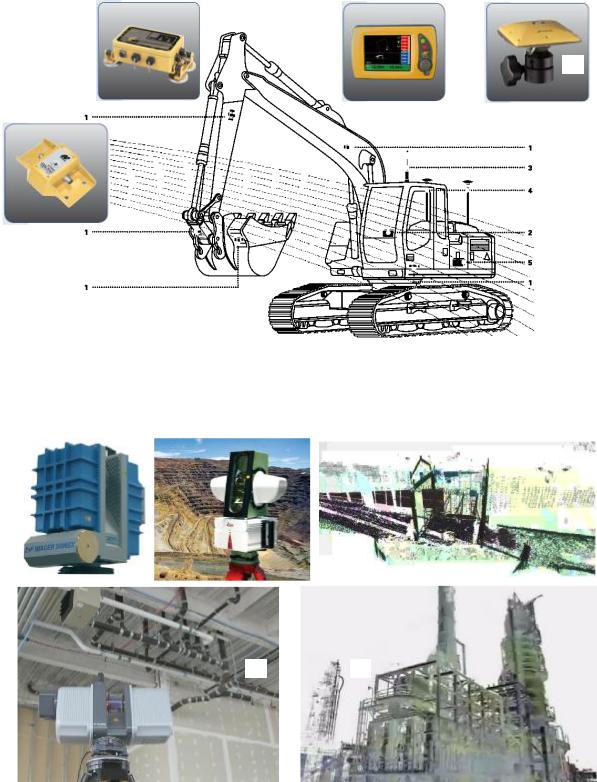
На рис. 1.2 в качестве примера приведены места установки элементов системы глобального спутникового позиционирования японского производителя Topcon 3Dxi на экскаваторе. Бортовой компьютер системы GX-60 имеет сенсорный дисплей, установлена операционная система Windows XP, частота процессора 650 МГц. Поддерживается беспроводная технология Bluetooth, имеются порты USB, Ethernet, RS-485, CAN и RS-232 с поддержкой USB-накопителей, ав-
томатическая регулировка подсветки. Система одновременно принимает спутниковые сигналы GPS и GLONASS, что повышает точность позиционирования (технология GPS+) [183].
Программно-аппаратный комплекс Topcon 3Dxi помогает оператору в реализации проекта, т.е. предоставляет ему информацию о точном положении рабочего органа в пространстве. Управление рабочими движениями осуществляется при этом вручную. Однако на некоторых других видах дорожной и строительной техники (автогрейдерах, бульдозерах, асфальтоукладчиках) при использовании
13
аналогичных систем предусмотрены режимы автоматического управления рабочими движениями машин.
4
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
||||||||||
|
|
|
|
2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
5 |
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
1 |
|
|||||||
1 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|||||||
Рис. 1.2. Система 3D-управления экскаватором Topcon 3Dxi, места установки элементов системы на экскаваторе: 1 – датчики наклона; 2 – бортовой компьютер GX-60; 3 – радиоантенна; 4 – антенна GPS+; 5 – спутниковый приемник
GPS+
а) |
|
б) |
|
г) |
в) д)
Рис. 1.3. Лазерные наземные 3D-сканеры (а, б, в) и полученные при 3Dсканировании графические отображения промышленных и строительных объектов в виде облака точек (г, д) (примеры)
14