Материал: 2426
зированной подготовки производства Tecnomatix компании Siemens PLM Software (отдел департамента Siemens Industry Automation не-
мецкого концерна Siemens AG), предназначен для разработки, симуляции, оптимизации, анализа и off-line программирования роботизированных и автоматизированных технологических процессов. Инструмент предоставляет платформу для оптимизации процессов и расчета времени цикла [28, 218, 242, 243].
Среди заявленных возможностей eM-Workplace присутствуют модуль для генерации свободных от столкновения траекторий движения робота, а также «оптимизация времени цикла».
Генерируемые траектории в среде со сложным расположением препятствий также не оптимальны по геометрической целевой функции, отсутствует возможность оптимизации с учетом угловых координат перемещаемого объекта. Другим достаточно существенным недостатком eM-Workplace является большая сложность установки и настройки САПР на ПК, необходимость предварительной установки другого специализированного ПО (БД Oracle и др.) и его ручной настройки путем создания собственной базы данных Tecnomatix с написанием пользовательских скриптов программ.
Наибольшей функциональностью с точки зрения поставленных в настоящей монографии задач обладает коммерческий САПР Kite
французской фирмы KINEO C.A.M. [231, 233].
Как показал анализ продукта Kite на ознакомительной 30дневной полнофункциональной версии, он позволяет сравнительно быстро планировать неоптимальные траектории перемещения объемных тел произвольной формы в трехмерном пространстве с произвольно же заданными препятствиями [231, 233]. Получаемая траектория в большинстве случаев расположения препятствий существенно не оптимальна по геометрическому критерию длины пути при любых сочетаниях настроек поиска, предоставляемых САПР (рис. 1.7). Время нахождения такой существенно не оптимальной траектории относительно велико даже в элементарных случаях и составляет от 5 до нескольких десятков секунд и более в зависимости от задаваемых настроек планировщика (метод планирования, локальной оптимизации и др.) на компьютере средней производительности (AMD Athlon 64 X2 Dual Core Processor 5600+2,90 ГГц).
Главное назначение данного САПР – автоматическая генерация свободной от столкновений, но в общем случае неоптимальной траектории движения объекта произвольной формы в среде с произволь-
25
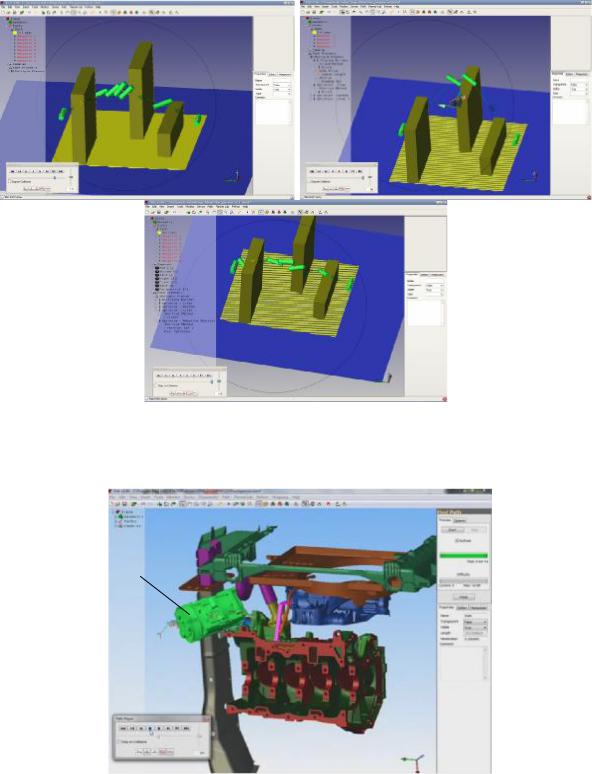
ными препятствиями. Подобные задачи характерны для сборочных операций в стесненных условиях (рис. 1.8).
Рис. 1.7. Траектории объемного объекта-цилиндра, спланированные в САПР Kite при одних и тех же начальных условиях задачи (тестовый пример, окно программы) с одинаковыми настройками
Компрессор
Рис. 1.8. Планирование свободной от столкновений траектории компрессора при его монтаже в сборочный узел силовой установки в САПР Kite
(окно программы)
26
В случае последующей локальной оптимизации найденной неоптимальной траектории, которая возможна только по степеням свободы перемещаемого объемного тела, время нахождения оптимизированной траектории существенно возрастает. Локальная оптимизация в случае неоптимальности исходной неоптимизированной траектории также не дает получения глобального минимума целевой функции, если исходная неоптимизированная траектория попадает в область локального минимума.
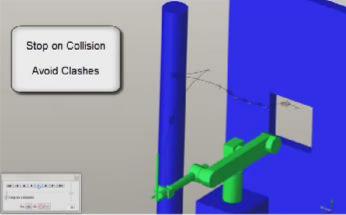
К достоинствам САПР Kite следует отнести возможность визуализации планируемых траекторий, а также ограниченную возможность планирования траекторий в пространстве конфигураций произвольного механизма (рис. 1.9). В этом случае также формируются некоторые существенно неоптимальные траектории. Недостатки заключаются в том, что в справочной документации данного САПР не раскрываются выражения для вычисления критериев оптимальности с учетом угловых координат перемещаемых объектов. Невозможно изменение расчетного выражения для вычисления целевой функции планирования и оптимизации траектории во всех случаях. Само значение целевой функции, характеризующей полученную траекторию, получить невозможно, оно остается неизвестным.
Не описаны также применяемые алгоритмы и методики. Из настроек программы (пунктов меню) можно сделать вывод, что для планирования траекторий, так же как и в VIZMO, применяются подходы и методики на основе рандомизации пространства: вероятностной дорожной карты (PRM, Probabilistic Road Map), быстро развертываемых случайным об-
разом деревьев пути (RRT, Rapidly-Exploring Random Tree), поиска на графах, локальной оптимизации. Генерируемые траектории в подавляющем большинстве случаев существенно неоптимальны. Кроме того, эти неоптимальные траектории имеют случайный характер, т.е. значительно отличаются друг от друга при многократной их генерации с одинаковыми начальными условиями задачи (см. рис. 1.7), т.е. в
27
общем случае генерируются некоторые допустимые, вариативные, при определенных настройках решателя сглаженные, но неоптимальные траектории.
Это делает нецелесообразным применение САПР Kite, а также других существующих САПР для решения рассматриваемой в настоящей монографии проблемы.
Возникает необходимость в создании специализированной САПР технологической подготовки строительного производства, назначение которой состояло бы в наиболее полном и эффективном решении задачи, т.е. разработке детализированных алгоритмов и методик решения задачи оптимизации траекторий движения объектов в неоднородном организованном пространстве, описанных с достаточной степенью подробности, допускающих возможность изменения целевой функции и модификации.
1.3. Современное состояние исследований в области оптимизации траекторий движения объектов в неоднородном организованном пространстве
Проблема оптимизации траекторий движения объектов в неоднородном организованном пространстве в отдельных своих аспектах широко исследована зарубежными и отечественными учеными.
Теоретической базой исследований послужили работы отечественных ученых в области планирования траекторий, управления манипуляционными роботами и поиска целей на графах состояний: С.Л. Зенкевича, А.А. Кобринского, А.Е. Кобринского, А.С. Ющенко, К.С. Яковлева, Е.А. Берзина, С.Д. Штовбы и др. Среди зарубежных уче-
ных: Steven M. LaValle, E.W. Dijkstra, N. M. Amato, G. Sanchez, N. Deo, P. E. Hart, J. Pearl, R. E. Korf, L.E. Kavraki, G. Syswerda, D. Whitley, J. H. Holland, R. Geraerts, X. Nguyen, J. Borenstein, I. Ulrich, M. Dorigo, Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, Clifford Stein, Stuart J. Russel, Peter Norvig, George F. Luger и др. [74, 138, 140, 141, 175, 199, 210, 212, 215, 217, 219, 221, 224, 228, 229, 230, 232, 234, 237, 244, 251].
Рассматриваются в основном объекты, обладающие двумя (аналог перемещение точки на карте) или тремя (аналог перемещение точки в пространстве) степенями свободы. В зарубежной и отечественной научной литературе недостаточно полно и подробно освещена проблема разработки эффективных алгоритмов и методик оптимиза-
28
ции траектории перемещения объемного объекта произвольной заданной формы с учетом его угловых координат в неоднородном организованном трехмерном пространстве с произвольным расположением и формой препятствий. Доступные для ознакомления по данной тематике материалы ограничиваются неглубоким (на уровне концепции, общей приблизительной схемы действий) описанием, не позволяющим практически решать поставленную задачу [74, 138, 140, 141, 175, 199, 210, 212, 215, 217, 219, 221, 224, 228, 229, 230, 232, 234 , 237, 244, 251].
Практически отсутствуют описания алгоритмов и методик, учитывающих не только линейные, но и угловые координаты объемного объекта произвольной формы, а также произвольную форму препятствий.
Задача выбора наиболее подходящего для решения конкретной задачи оптимизации траектории перемещения объекта метода является сложной и до настоящего времени полностью не формализованной.
Анализ научно-технической литературы по рассматриваемой проблематике позволил выделить несколько общих подходов, которые могут быть применены и применяются для решения поставленной задачи планирования и оптимизации траектории в многомерном пространстве с учетом как линейных, так и угловых координат объ-
емного тела груза [74, 138, 140, 141, 175, 199, 210, 212, 215, 217, 219, 221, 224, 228, 229, 230, 232, 234 , 237, 244, 251]:
1)подход, при котором используются явное описание пространства возможных состояний объекта и препятствий в непрерывном аналитическом виде и аналитические методики поиска оптимальной траектории;
2)дискретное представление искомой траектории в виде n×m независимых переменных-координат объекта как n множеств из m учитываемых координат объемного тела (m координат механизма) в n отдельных последовательных точках траектории с дальнейшим решением задачи оптимизации функции n×m переменных известными методами оптимизации целевых функций при неявном описании последних;
3)получение искомой траектории как дискретной последовательности промежуточных точек, генерируемых при оптимизации целевой функции m переменных (m учитываемых координат объемного тела или m координат механизма) известными методами оптимизации (например, симплекс-методом);
29