Материал: 2426
Поэтому предложено осуществлять проверку выполнения условия непересечения с препятствиями всех точек, лежащих на прямой в пространстве конфигураций между точками si1 и sj1, используя второй способ, по следующей модификации рекурсивного алгоритма.
4.1. Переменная break, определяющая наличие (break=1) либо отсутствие (break=0) пересечения груза с препятствиями при движении по прямой в пространстве конфигураций между двумя точками si1 и sj1, принимается равной нулю:
break=0. (3.104)
4.2. В цикле с идентификатором i2 происходит изменение значения индекса i2 от 1 до некоторого максимального значения i2max, определяемого условием
|
L≤ Lmin, |
|
|
(3.105) |
|
где Lmin – постоянная величина, |
|
|
|
||
DL = |
|
+ cγω × |
|
, |
|
(Dx2)2 + (Dy2)2 + (Dz2)2 |
(Dγ 2)2 + (Dω2)2 |
(3.106) |
|||
здесь |
|
|
|
||
|
x2=(xi1–xj1)/i2; y2=(yi1–yj1)/i2; z2=(zi1–zj1)/i2; |
|
|||
|
Δγ2=(γi1–γj1)/i2; Δω2=(ωi1–ωj1)/i2. |
(3.107) |
|||
|
L |
sj1 |
|
||
|
si1 |
|
|||
|
|
|
i2=1; j2 [1;2] |
|
|
|
|
|
i2=2; j2 [1;4] |
|
|
 i2=4; j2 [1;8]
i2=4; j2 [1;8]
…………………………………………
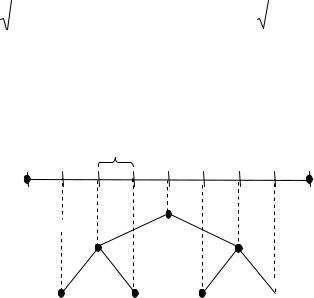
Рис. 3.23. Графическая интерпретация модификации рекурсивного алгоритма деления отрезка пополам (пример на плоскости, дерево рекурсии)
Изменение индекса i2 на каждой итерации цикла i2 происходит по закону геометрической прогрессии (увеличение в 2 раза):
i2=i2 ∙ 2. |
(3.108) |
125
Значение i2 определяет количество равноотстоящих друг от друга точек на прямой между точками si1 и sj1, в которых на текущей итерации цикла i2 происходит проверка пересечения груза с препятствиями
(рис. 3.23).
4.3. Кроме того, на каждой итерации цикла i2 во вложенном цикле j2 с интервалом в 1 варьируется вспомогательный индекс j2:
j2 [1; i2∙2]. |
(3.109) |
Максимальное значение j2=i2∙2 определяет суммарное количество точек, проверенных на пересечение с препятствиями с начала цикла i2. Причем на каждой итерации цикла i2 во вложенном цикле j2 проверяются новые точки, не совпадающие с проверенными на предыдущей итерации i2 (см. рис. 3.23). Для этого на каждой итерации алгоритма i2 определяются собственные значения координат точки, с которой начинается проверка:
x2нач=xi1+(xi1–xj1)/(i2∙2); y2нач=yi1+(yi1–yj1)/(i2∙2); z2нач=zi1+(zi1–zj1)/(i2∙2);
γ2нач=γi1+(γi1–γj1)/(i2∙2); ω2нач=ωi1+(ωi1–ωj1)/(i2∙2). (3.110)
Затем во вложенном цикле j2 вычисляются координаты текущей проверяемой точки:
x2= x2нач+ x2∙(j2–1); y2= y2нач+ y2∙(j2–1); z2= z2нач+ |
z2∙(j2–1); |
|
γ2= γ2нач+ Δγ2∙(j2–1); ω2= ω2нач+ Δω2∙(j2–1). |
(3.111) |
|
Соответствующие индексы координат на равномерной дискрет- |
||
ной сетке определяются следующим образом: |
|
|
i= x2/ l ; j= y2/ l ; k= z2/ l ; l= (γ2–γmin)/ |
u ; |
|
m= (ω2– ωmin)/ u . |
|
(3.112) |
4.4. Далее во вложенном цикле j2 для текущей проверяемой точки с индексами координат (3.112) выполняется собственно проверка условия непересечения груза с препятствиями (3.102). В случае, если данное условие не выполняется, т.е. имеет место пересечение груза с препятствиями, переменная break принимается равной 1 и одновременно циклы j2 и i2 прерываются:
break=1. (3.113)
126
4.5. Данный пункт выполняется после завершения либо прерывания вложенных циклов j2 и i2. Выполняется проверка условия (3.104). Если данное условие не выполняется, т.е. имеет место пересечение груза с препятствиями при движении из точки si1 в sj1, вес соответствующей дуги (ребра) графа принимается равным бесконечно большому значению по (3.97). В случае выполнения условия (3.104) вес дуги рассчитывается как значение целевой функции СВД по (3.18).
5. Осуществляется поиск кратчайшего пути между двумя вершинами графа (sнач и sкон) при помощи алгоритма Дейкстры [216]. Результатом поиска является оптимальная траектория S* с минимальным значением целевой функции L*, представляющая собой последовательность из нескольких вершин графа дорожной карты Gr:
S*={sp}sn= .
p 1
6. Осуществляется линейная интерполяция найденной траектории на равномерной сетке обобщенной координаты xi (i [1; imax]) для вычисления обобщенных координат yi, zi, γi, ωi. Под интерполяцией подразумевается вычисление значений каждой из обобщенных координат груза в промежутках между узловыми точками найденной траектории, которое выполняется по известному алгоритму [65, 191].
Пуск |
1 |
2 |
|
|
|
Ввод исходных данных: sнач=(xн0, yн0, zн0, γн0, ωн0); |
sкон=(xк0, yк0, zк0, γк0, ωк0); |
|
{ R }; imax; jmax; kmax; lmax; mmax; [YПР]; ng; cγω; |
u; δopt; lзап_г; lзап_в |
|
ig |
|
3 |
|
|
|
Построение массива гиперповерхности [Ymin] по методике раздела 3.4
4
s1=sнач=(xн0, yн0, zн0, γн0, ωн0)
p=2 5 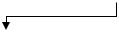 6
6
ip= Rand∙imax
Rand∙imax ; jp=
; jp= Rand∙jmax
Rand∙jmax ; kp=
; kp= Rand∙kmax
Rand∙kmax ; lp=
; lp= Rand∙lmax
Rand∙lmax ; mp=
; mp= Rand∙mmax
Rand∙mmax ;
;
xp=ip∙Δl; yp= jp∙Δl; zp=kp∙Δl; γp=(lp–0,5∙lmax)∙Δu; ωp=(mp–0,5∙mmax)∙Δu
 7 yp≥Ymin(ip,kp,lp,mp) Нет
7 yp≥Ymin(ip,kp,lp,mp) Нет
 Да 8 p=p+1
Да 8 p=p+1
1 |
10 |
Да |
9 |
Нет |
|
sng=sкон=(xк0, yк0, zк0, γк0, ωк0) |
p>(ng–1) |
||||
|
|
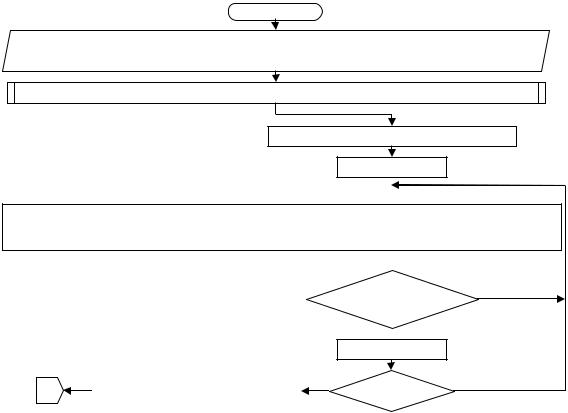
Рис. 3.24. Блок-схема модифицированного алгоритма ВДК для пяти учитываемых обобщенных координат груза (начало)
127
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
i1 |
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
i1=1; |
i1≤ng; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
i1=i1+1 |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
j1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
j1=1; |
j1≤ng; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
j1=j1+1 |
|
|
|
|
|
|
|
|
|
|
i2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Нет 13 |
|
|
Да |
|
|
14 |
|
i2=2; L≤ΔLmin; |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
i2=i2∙2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
break=0 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
xj1≥ xi1 |
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
x2нач=xi1+(xi1–xj1)/(i2∙2); y2нач=yi1+(yi1–yj1)/(i2∙2); z2нач=zi1+(zi1–zj1)/(i2∙2); |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
γ2нач=γi1+(γi1–γj1)/(i2∙2); ω2нач=ωi1+(ωi1–ωj1)/(i2∙2) |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2=(xi1–xj1)/i2; |
y2=(yi1–yj1)/i2; |
z2=(zi1–zj1)/i2; |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δγ2=(γi1–γj1)/i2; Δω2=(ωi1–ωj1)/i2 |
18 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
L = |
( x2)2 + ( y2)2 + ( z2)2 |
+ cγω × |
( γ 2)2 + ( ω2)2 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j2 |
19 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j2=1; j2≤ i2∙2; |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j2=j2+1 |
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
x2= x2нач+ x2∙(j2–1); y2= y2нач+ y2∙(j2–1); z2= z2нач+ z2∙(j2–1); |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
γ2= γ2нач+ Δγ2∙(j2–1); ω2= ω2нач+ Δω2∙(j2–1) |
|
|
|
|
21 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
i= x2/ l ; j= y2/ l ; k= z2/ |
l ; l= (γ2–γmin)/ |
|
u ; m= (ω2– ωmin)/ |
u |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
Нет |
|
|
|
|
|
|
26 |
|
|
|
|
|
|
|
|
Да |
|
22 |
Нет |
|
23 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2≥Ymin(i,k,l,m) |
|
|
||||||||||||||
break=0 |
|
|
|
|
|
|
|
|
|
break=1 |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
27 |
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Li1,j1=∞ |
|
|
|
|
28 |
|
|
j2 |
|
24 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
æ |
|
|
|
|
|
|
|
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
2 |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
ç |
|
(xi1 - x j1 ) |
|
÷ |
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
|
|||||||||||
|
|
Li1 j1 = çç + (yi1 - y j1 )2 + |
÷÷ + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
i2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
ç |
+ |
|
|
|
|
2 |
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
ç |
(zi1 - z j1 ) |
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
è |
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
+ cγω × |
(γ i1 - γ j1 )2 + (ωi1 - ω j1 )2 |
|
|
|
|
|
|
|
|
|
|
|
31 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
29 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поиск кратчайшего пути между двумя вершинами |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
j1 |
|
|
|
|
|
|
|
графа (sнач и sкон) при помощи алгоритма Дейкстры |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Интерполяция и дискретная локальная оптимизация |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
найденной траектории по методике раздела 3.5 |
|||||||||||||
|
|
|
|
|
|
|
i1 |
|
|
|
|
|
|
|
Вывод резуль- |
33 |
|
|
34 |
|
32 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
татов: S*, L* |
|
|
Останов |
|
|
|
|
|||||
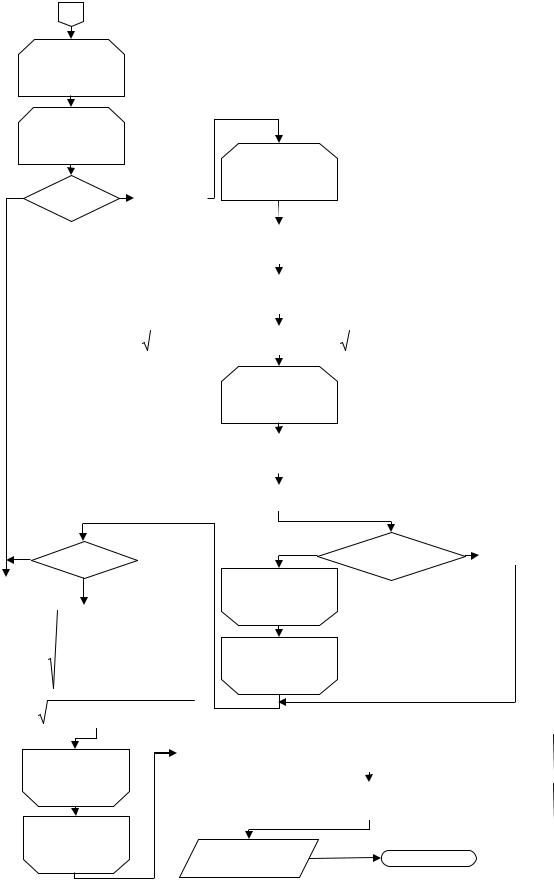
Рис. 3.24. Блок-схема модифицированного алгоритма ВДК для пяти учитываемых обобщенных координат груза (окончание)
128
В результате интерполяции получается траектория, представляющая собой последовательность из смежных вершин, заданных на
равномерной решетке S*={sp}ipmax=1 .
7.Выполняется локальная оптимизация интерполированной траектории S* по методике, изложенной в разделе 3.5.
8.Определяется уточненное значение целевой функции L* оптимизированной лучшей траектории S* по (3.19).
9.Вывод результатов: L*, S*. Окончание работы алгоритма.
Блок-схема модифицированного алгоритма ВДК перемещения груза, положение которого определяют 3 линейные и 2 угловые обобщенные координаты, приведена на рис. 3.24. Вычислительные реализации модифицированного алгоритма и описанной методики на его основе в средах Microsoft Visual C++ и MATLAB показали работоспособность и эффективность алгоритма для решения поставленной задачи.
3.9. Методика планирования траектории на основе алгоритма декомпозиции линейных и угловых координат
Для решения задачи, сформулированной в разделе 3.1, предлагается применить метод декомпозиции, разбивающий исходную задачу на несколько более мелких подзадач. Данный подход использует основную идею метода динамического программирования, которая заключается в уменьшении размерности задачи за счет ее декомпозиции на подзадачи, каждая из которых имеет меньшую размерность по сравнению с основной. Оптимальное решение подзадач меньшего размера используется для решения исходной задачи [27, 74, 204, 209].
Предлагается разделить на две отдельные подзадачи оптимизацию линейных координат груза и его угловых координат. Все преобразования в трехмерном пространстве могут быть сведены к композиции двух преобразований: вращения и переноса вдоль координатных осей. Это позволяет разделить и выполнять по отдельности: 1) нахождение траектории определенной точки груза в трехмерном пространстве с препятствиями; 2) оптимизацию траекторий трех угловых обобщенных координат груза. Необходимо разработать методику планирования траектории на основе алгоритма декомпозиции линейных и угловых координат.
129