Материал: 2426
Выполнение п. 3.1 алгоритма, если расположение осей координат соответствует условиям задачи и рис. 3.28, происходит в следующем порядке. Рабочая область с препятствиями задана в виде двухмерного
массива чисел – высот точек поверхности YЭ(i,k), где i [1; imax]; k [1; kmax]; imax – число точек рассматриваемой области вдоль оси X0; kmax –
число точек вдоль оси Z0. При помощи циклов, меняющих i и k в заданной последовательности (i, затем k), осуществляется перебор каждой точки сетки с высотой YЭ(i,k) и проверка выполнения условия
YЭ(i,k)>min[yн0, yк0]. (3.117)
При выполнении данного условия текущий узел графа Gr заносится в список узлов подграфа PGr. Первой в списке предварительно ставится начальная точка (1 на рис. 3.28), последней – конечная (89 на рис. 3.28). Последняя точка имеет номер i2кон [83].
Выполнение п. 3.1 алгоритма предлагается осуществлять следующим способом. Выполняется последовательный перебор всех
вершин подграфа из списка i2 [2; i2кон], и для каждой текущей вершины осуществляется построение прямой в пространстве между те-
кущей вершиной и всеми вершинами с большими номерами: j2 [i2+1; i2кон]. Прямая разбивается на k2кон отрезков в соответствии с заданным шагом дискретности l, и на данной прямой на равном расстоянии друг от друга расстанавливаются k2кон промежуточных точек, каждая со своими координатами в пространстве. Каждая из промежуточных точек прямой имеет координаты
xk2=xi2+(xi2–xj2)×k2/k2кон; yk2=yi2+(yi2–yj2)×k2/k2кон; |
|
zk2=zi2+(zi2–zj2)×k2/k2кон, |
(3.118) |
где k2 [ 1; k2кон]; k2кон=(Lлин)i2,j2/ l.
Для каждой точки проверяется условие превышения ее вертикальной координаты над соответствующей вертикальной координатой
поверхности: |
|
yk2>YЭ(i3,k3), |
(3.119) |
где i3= xk2/ l ; k3= zk2/ l .
Если для всех k2кон точек отдельной прямой, соединяющей узел i2 с узлом j2, данное условие выполняется, делается вывод о том, что узлы i2 и j2 «видимы» между собой, информация об этом сохраняется в бинарной (булевой) переменной (Vid=1), и длина прямой (Lлин)i2,j2
135
между двумя точками в трехмерном пространстве вычисляется по выражению
(Lлин )i2, j2 = |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
||||||||
(xi2 − x j2 )2 + (yi2 − y j2 )2 + (zi2 − z j2 )2 |
(3.120) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
Пуск |
|
1 |
|
|
|
|
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Задание поверхности препятствий YЭ и начальной |
|
|
||||||||||||||||||||
|
|
|
|
и конечной точек положения груза: |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
(xн0, yн0, zн0) и (xк0, yк0, zк0) |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
i2=1; |
|
[xi2 zi2 yi2]=[xн0 yн0 zн0] |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
i=1:imax |
|
4 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
k=1:kmax |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Нет |
YЭ(i,k)>min[yн0, yк0] |
6 |
|
Да |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i2=i2+1; |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
[xi2 zi2 yi2]=[xi YПР(i,k) zk] |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
i2кон=i2+1; |
|
[xi2кон zi2 кон yi2 кон]=[xк0 yк0 zк0] |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
i2=2:i2кон |
|
10 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
j2=(i2+1):i2кон |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
(Lлин )i2, j2 = |
(xi2 - xj2 )2 + (yi2 - y j2 )2 + (zi2 - z j2 )2 |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
k2кон=(Lлин)i2,j2/ |
l; |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Vid=1 |
|
|
14 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
k2=1:k2кон |
|
|
|
|
|
|
|
|
|
15 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xk2=xi2+(xi2–xj2)×k2/k2кон; yk2=yi2+(yi2–yj2)×k2/k2кон; zk2=zi2+(zi2–zj2)×k2/k2кон; |
|
||||||||||||||||||||||
|
|
|
|
|
i3= xk2/ l ; k3= zk2/ l |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
Нет |
|
yk2<YЭ(i3,k3) |
16 |
|
Да |
|
17 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vid=0 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Нет 18 |
Да |
|
|
|
|
19 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Vid=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
(Lлин)i2,j2=∞ |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
21 |
|
|
|
|
Вывод результатов: |
20 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
Останов |
|
|
|
|
|
|
|
|
|
|
|
i2кон |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
PDG=[(Lлин)i2,j2] i2,j2=1 |
|
|
|||||||||
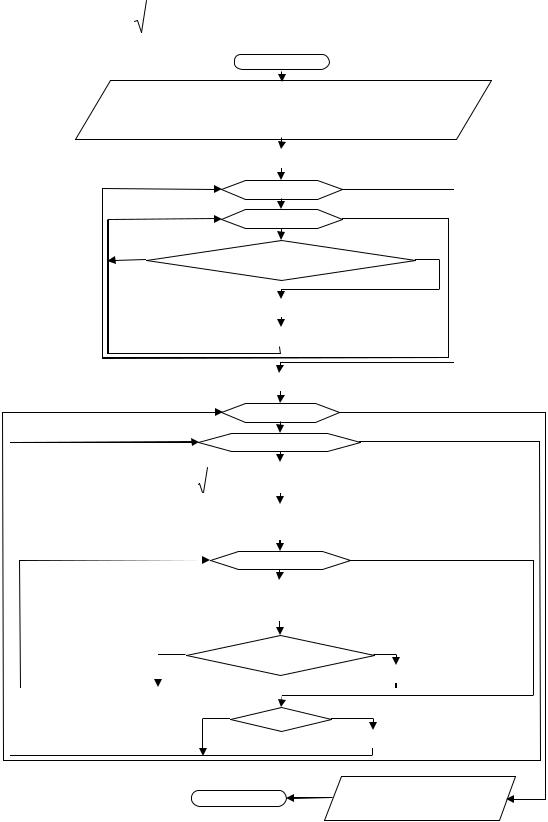
Рис. 3.29. Блок-схема алгоритма формирования матрицы весов PDG подграфа PGr
136
В противном случае длина принимается равной бесконечно большому значению (Vid=0):
(Lлин)i2,j2=∞. (3.121)
Информация о «видимости» заносится в виде длины прямой (Lлин)i2,j2 в матрицу смежности подграфа. Матрица весов PDG подграфа PGr, список вершин которого состоит из i2кон элементов, будет иметь размеры (i2кон×i2кон). Элементы матрицы заполняются соответствующими значениями:
PDG=[(Lлин)i2,j2]ii22кон,j2=1. (3.122)
Блок-схема алгоритма создания матрицы весов подграфа по описанной методике приведена на рис. 3.29.
Из найденных любым алгоритмом поиска кратчайшего пути на графе траекторий {(SL*)in}innдек=1 каждая представляет собой последова-
тельность из нескольких вершин sl подграфа PGr: SL*={slp}snp=1.
4. Осуществляется линейная интерполяция каждой найденной траектории из множества {(SL*)in}innдек=1 на равномерной сетке обоб-
щенной координаты xi (i [1; imax]) по известному алгоритму [65, 191] для вычисления обобщенных координат yi, zi. В результате интерполяции формируются траектории точки в трехмерном пространстве, представляющие собой последовательности из смежных вершин, за-
данных на равномерной решетке SL*={slp}ipmax=1 .
Линейные траектории состоят каждая из последовательно располагающихся вдоль оси X0 точек вида
slp=(xp, yp, zp), p [1; imax], |
(3.123) |
где xp [0∙Δl; imax∙Δl].
Т.е. каждая из найденных траекторий представлена в виде набора точек с равномерно возрастающими значениями вдоль одной из осей координат X0 через равные интервалы.
5. Для каждой из найденных траекторий {(SL*)in}innдек=1 создается
3-мерное пространство с препятствиями {Puin}innдек=1 соответственно,
состоящее из одной линейной x и из двух угловых координат объекта: γ и ω. Для создания пространства Puin груз перемещается из начального положения в конечное по траектории (SL*)in с шагом квантования
137
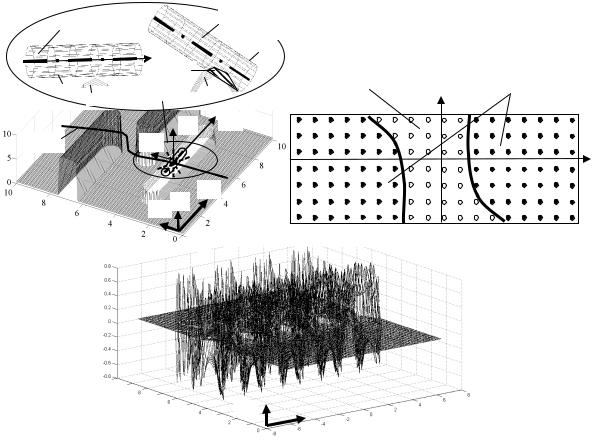
l точки начала системы координат груза вдоль оси X0. В каждом из промежуточных положений груза на траектории (SL*)in (рис. 3.30, а) рассматриваются с шагом квантования u все возможные сочетания его варьируемых угловых координат γ и ω в заданных (3.40) граничных пределах.
Разрешенное |
|
Запрещенное |
|
|
|
|
состояние |
|
|
||
состояние |
|
|
Область |
Область |
|
|
|
|
|||
|
|
|
|
||
|
Zg |
x |
|
разрешенных |
запрещенных |
|
|
состояний |
состояний |
||
|
|
|
|
||
|
|
|
Zg |
|
ω |
(SL*)in |
Xg |
Yg |
|
γ |
|
|
|
|
|||
|
X0 |
Y0 |
Z0 |
|
|
|
|
|
|
||
а) |
|
|
|
|
б) |
X0 ω γ в) 
Рис. 3.30. К определению разрешенных и запрещенных состояний груза для заданной траектории точки его начала системы координат (примеры): а – траектория (SL*)in точки начала системы координат и одно из промежуточных положений груза на ней; б – области разрешенных и запрещенных состояний груза в отдельной точке; в – пространство Puin из одной линейной
и двух угловых координат
C использованием гиперповерхности минимальных значений вертикальных координат условного центра груза [Ymin]in, сформированной по методике, описанной в разделе 3.4, формируется простран-
ство с препятствиями {Puin}innдек=1 . При рассмотрении двух угловых ко-
ординат в качестве иллюстрации могут быть построены двухмерные графики, на каждом их которых будут присутствовать в общем случае две области: запрещенных и разрешенных состояний (рис. 3.30, б). В результате дискретного рассмотрения сочетаний углов на траектории
138

движения (SL*)in формируется пространство Puin, в котором задана область препятствий, т.е. запрещенных состояний груза (рис. 3.30, в).
Пространство Pu представлено в виде трехмерного массива битовых элементов:
ì0 |
при |
yi ³ Ymin (i,k,l,m); |
(3.124) |
||
Pu(i, l, m) = í |
при |
y |
|
< Y (i,k,l,m), |
|
1 |
i |
|
|||
î |
|
|
min |
|
|
где i [1; imax]; k= zi/ l ; l [1; lmax]; m [1; mmax]; yi, zi – соответствую-
щие координаты точки i траектории SL*.
6. Учитывая, что начальное и конечное положения груза заданы при постановке задачи, включая угловую ориентацию (γн0, γк0, ωн0, ωк0), это определит положение начальной и конечной точек груза в пространстве Puin и позволит найти кратчайшую траекторию с учетом угловых координат. В результате для каждой траектории точки условного центра груза (SL*)in находится соответствующая «угловая траектория» У*in, минимизированная по угловым перемещениям груза с учетом заданных ограничений на значения угловых координат.
Множество «угловых траекторий» {(У*)in}innдек=1 формируется аналогич-
но траекториям {(SL*)in}innдек=1 с формированием матрицы весов PDGin
пространства Puin на дискретной равномерной сетке координат с шагами дискретизации l (для x), u (для γ и ω) и поиском кратчайшего пути на графе (п. 3 настоящего алгоритма). Для пространств Puin используется собственное выражение целевой функции, учитывающее только угловые координаты:
|
imax |
|
|
|
|
|
Lугл = |
( (γ i -γ i−1 )2 + (ωi -ωi−1 )2 ). |
(3.125) |
||||
å |
||||||
|
i=2 |
|
|
|
|
|
7. При совмещении линейной (SL*)in и угловой (У*)in траекторий формируется общая траектория груза SLУin вида (3.50), которая может быть оценена по значению целевой функции L*in, вычисленной по
(3.19):
SLУin=(SL*)in U (У*)in. |
(3.126) |
«Угловой траектории» (У*)in может не существовать при определенной конфигурации поверхности препятствий в пространстве Puin (непреодолимые при заданных ограничениях препятствия). В этом случае будет отсутствовать и общая траектория SLУin. Вероятность
139