Материал: 2423
снимков и независимое перемещение одного из снимков (одной из марок) вдоль тех же координатных осей. Величины перемещений снимков (марок) должны учитываться измерительными устройствами.
Способ мнимой марки является основным в фотограмметрии и применяется в большинстве фотограмметрических приборов. Используемые в них измерительные марки имеют различную форму (рис. 6.9); в некоторых приборах наблюдатель может изменить раз-
меры марок (от 0,02 до 0,10 мм), цвет (бе- |
|
|
|
|
|
|
|
|
|
|
|
лый, красный, зеленый) и их яркость от- |
|
|
|
|
|
|
|
|
|
|
|
дельно для левой и правой ветвей наблюда- |
|
Рис. 6.9. Формы |
|||
тельной системы. Размеры левой и правой |
измерительных марок |
||||
марок не должны различаться более чем на 10 %.
|
|
6.6. Стереокомпараторы |
|
|||
Стереокомпаратор является наиболее высокоточным стереофо- |
||||||
тограмметрическим прибором, предназначенным для определения |
||||||
положения соответственных точек на смежных снимках, которое ха- |
||||||
рактеризуется координатами ее изображения, т. е. величинами x1, y1, |
||||||
x2 и y2, (рис. 6.10), или величинами x1, y1, p и q, причем |
|
|||||
|
|
|
p = x1 x2, |
q = y1 y2. |
(6.4) |
|
Величина p называется продольным параллаксом точки, а |
||||||
величина q – поперечным па- |
y |
y |
||||
раллаксом. |
|
|
a1 |
a2 |
||
Для |
измерения этих коор- |
|||||
|
b2 |
|||||
динат и параллаксов и предна- |
b1 |
|||||
|
||||||
значен стереокомпаратор. |
x |
x |
||||
Существуют несколько раз- |
|
|
||||
личных |
конструкций |
стерео- |
|
|
||
компараторов, но их принци- |
|
|
||||
пиальная |
схема, представленная |
Рис. 6.10. Координаты |
||||
на рис. 6.11, |
не меняется более |
соответственных точек |
||||
100 лет. |
|
|
|
на паре снимков |
||
На массивной станине 1 размещена общая каретка 2, пере- |
||||||
мещающаяся вдоль оси X прибора и несущая левый снимкодержатель |
||||||
P1. В правой части общей каретки 2 расположена параллактическая |
||||||
каретка 4, которая вместе с установленным на ней правым снимкодер- |
||||||
жателем P2 перемещается относительно каретки 1 вдоль оси X. |
||||||
160
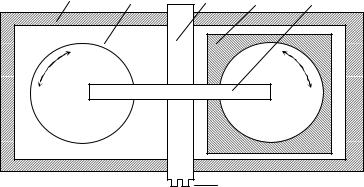
Вдоль оси Y прибора по мостику 3 перемещается подвижная часть наблюдательной системы 5, правая ветвь которой имеет дополнительное (по отношению к левой ветви) перемещение вдоль оси Y прибора. Величины перемещений подвижных частей прибора измеряются по шкалам абсцисс, ординат, продольных и поперечных параллаксов.
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
P1 |
|
|
P2 |
|
|
|
|
6 |
|
|
Рис. 6.11. Принципиальная |
|
||
|
схема стереокомпаратора |
|
||
Оба снимкодержателя могут разворачиваться в своих плоскостях на углы . Наблюдение снимков выполняется через бинокулярный микроскоп 6. Измерение стереомодели выполняется марками, вмонтированными в левую и правую ветви наблюдательной системы.
Рассмотренная принципиальная схема стереокомпаратора обеспечивает возможность ориентирования снимков, получения стереомодели, наведения измерительной марки на произвольные ее точки и измерения координат и параллаксов точек.
Современные стереокомпараторы характеризуются высокой точностью измерений, переменным увеличением наблюдательной системы от 6-ти до 20 -ти , а также наличием устройств регистрации результатов измерений на машинных носителях.
161
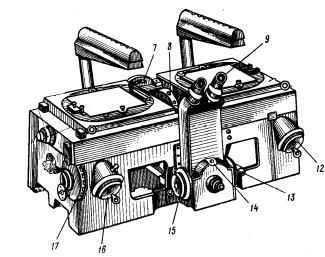
Стереокомпаратор Стеко 1818 производства фирмы «Карл
Цейсс Йена» (рис. 6.12) по- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
лучил в нашей стране наи- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
большее |
распространение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
7 |
|
|
|
|
|||||||||
|
|
|
|
|
9 |
|
||||||||||||||
Прибор |
предназначен |
для |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
измерения координат и па- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
раллаксов точек по снимкам |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
формата 18 18 см. Коэффи- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
циент увеличения наблюда- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
тельной системы 8 . Визиро- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
6 |
||||||||||||||
вание осуществляется с по- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
5 |
|
|
||||||||||||
мощью |
марок, |
располо- |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|||||
женных |
в фокальной |
плос- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
кости |
окуляров. |
Марки |
Рис. 6.12. |
Стереокомпаратор Стеко 1818 |
||||||||||||||||
|
||||||||||||||||||||
|
||||||||||||||||||||
имеют форму баллончиков с точкой в нижней части; для наведения на точки используют точку или
нижний конец баллончика. Наблюдение стереомодели и ее измерение выполняется с помощью бинокулярного микроскопа 7. Наведение на точки снимков выполняют вращением штурвалов абсцисс X (2), ординат Y (3), продольного параллакса p (6) и кольца поперечного параллакса q (5). Значения координат x и y отсчитывают по круговым шкалам абсцисс (1) и ординат (4) с точностью 0,02 мм, а p и q – по круговым шкалам продольных (8) и поперечных (9) параллаксов с точностью 5 мкм.
Автоматизированные стереокомпараторы СКА-30 и СКА-1818 обеспечивают выполнение измерений по снимкам формата 18 18 или 30 30 соответственно с ошибкой 2–5 мкм с регистрацией полученных результатов на машинный носитель. Увеличение наблюдательной системы переменное, от 6-ти до 20 -ти. Особенностью этих приборов является возможность наблюдения дополнительного снимка или кадра неразрезанного аэрофильма (например, смежного маршрута) в паре с одним из основных, что важно для повышения надежности отождествления наблюдаемых точек.
Стереокомпаратор Stecometer фирмы «Карл Цейсс Йена» предназначен для измерения координат и параллаксов точек снимков формата 23 23 см с точностью 2 мкм. Для регистрации результатов измерений на машинном носителе к прибору подключается коордиметр – универсальная электронная система, предназначенная для ре-
162
гистрации данных, полученных на любом стереофотограмметричес- |
||||||||||
ком приборе, выпускаемом фирмой. |
|
|
|
|
|
|||||
В настоящее |
время, в связи с массовым применением методов |
|||||||||
цифровой фотограмметрии, стереокомпараторы потеряли актуаль- |
||||||||||
ность, однако они имеют достаточно широкое распространение и ос- |
||||||||||
таются высокоточными приборами. |
|
|
|
|
|
|||||
|
|
6.7. Точность измерений |
|
|
|
|||||
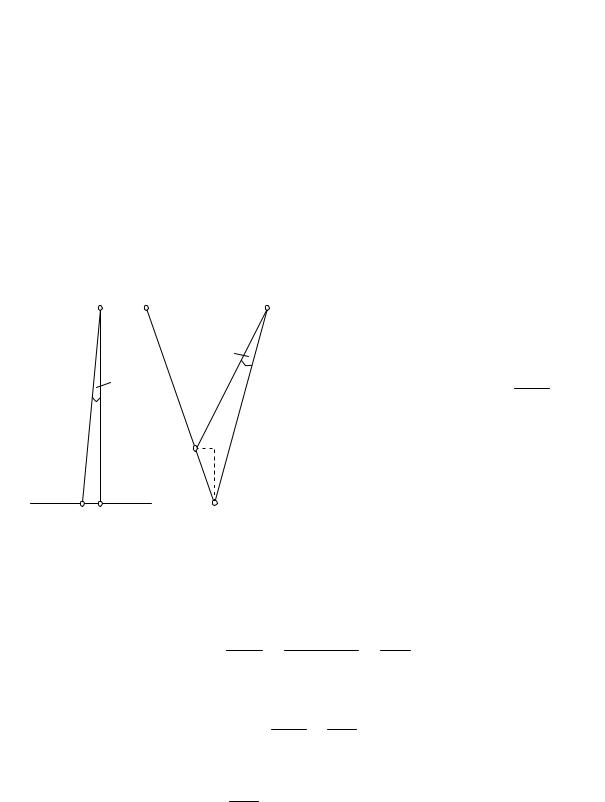
При монокулярном наведении измерительной марки m на |
||||||||||
точку снимка a (рис. 6.13, а) при помощи системы с увеличением v |
||||||||||
наблюдатель заметит их несовмещение ma, если его угловая величина |
||||||||||
больше или равна остроте монокулярного зрения первого рода m/v. |
||||||||||
|
|
|
|
|
|
Полагая отрезок Oa соответ- |
||||
|
O |
O1 |
|
|
O2 |
ствующим расстоянию |
наи- |
|||
|
|
|
|
|
|
лучшего |
зрения D, найдем |
|||
|
m |
b |
|
|
|
ошибку |
наведения |
|
||
|
|
|
|
|
|
|
x |
D m |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
v |
|
|
|
x |
|
|
|
|
Для |
(6.5) |
оп- |
|
|
|
m |
h |
|
|
определения |
||||
m |
|
|
|
тимального |
увеличения |
|||||
a |
|
a |
|
|
||||||
|
|
|
изображения |
теоретически |
||||||
|
|
|
|
|
||||||
|
а) |
б) |
|
|
|
возможную |
разрешающую |
|||
Рис. 6.13. Точность монокулярных (а) и |
способность объектива |
(1.7) |
||||||||
стереоскопических (б) измерений |
представим в угловой мере, |
|||||||||
|
|
|
|
|
|
для |
чего |
линейный размер |
||
разрешения 1/Rоб разделим на фокусное расстояние и умножим на |
||||||||||
|
|
|
|
|
206265f 140 |
|
|
|
||
|
|
|
|
|
|
|||||
|
|
|
fRоб |
fd1480 |
d |
|
|
|
||
и приравняем полученное значение величине m / v. |
|
|||||||||
|
|
|
m 140 |
|
|
|
|
|||
|
|
|
|
|
|
d . |
|
|
|
|
Отсюда оптимальное увеличения изображения |
|
|
||||||||
|
d |
m , |
(6.6) |
140 |
где d – диаметр действующего отверстия объектива. При d = 30 мм и m = 45 получим, что v = 10 .
163
Принято считать, что при юстировке прибора увеличение должно быть порядка 20 , при измерении координат точек снимков – 10 , а при съемке рельефа и контуров, когда важно иметь большое поле зрение наблюдательной системы, увеличение должно быть 4–8 .
При стереоскопических измерениях, совмещая измерительную марку m с точкой стереомодели a (рис. 6.13, б), наблюдатель допускает ошибку x в плане и ошибку h по высоте, величины которых зависят от остроты бинокулярного зрения первого рода b.
Оценку ошибки по высоте найдем по формуле (6.2), заменив D на h, учтя увеличение v наблюдательной системы:
|
h D |
2 |
|
b |
|
||
|
|
|
|
|
. |
(6.7) |
|
|
|
|
|
||||
|
|
|
bг v |
|
|||
|
Ошибка измерений в плане, как следует из рис. 6.13, a, равна |
||||||
|
p D |
|
|
||||
|
b |
. |
(6.8) |
||||
|
|
||||||
|
|
|
|
v |
|
||
|
При D = 250 мм, bг= 65 мм, |
v = 10 и |
b= 20 получим |
||||
p = |
2,4 мкм и h= 9 мкм. Ошибка монокулярного измерения x, по- |
||||||
лученная по формуле (7.5) при m= 45 и v = 10 , составляет 5 мкм.
Контрольные вопросы
1.Перечислите качественные и количественные характеристики глаза.
2.В какой области спектра электромагнитного излучения максимум цветовой чувствительности глаза?
3.Чем характеризуется острота монокулярного зрения первого и второго рода?
4.Во сколько раз выше острота бинокулярного зрения по отношению к монокулярному?
5.При каких условиях бинокулярное зрение переходит в стереоскопическое?
6.Какие пять условий необходимо выполнить для восприятия глубины объекта при рассматривании изображений, полученных по законам центральной проекции?
7.Как необходимо ориентировать перекрывающиеся снимки для получения прямого, обратного и нулевого стереоэффектов?
8.Перечислите способы стереоскопических наблюдений.
9.В чём сущность монокулярного способа измерения снимков?
164