Материал: 2423
S – количество центров проекций снимков, координаты которых были определены с помощью системы GPS;
j – количество снимков, угловые элементы которых были определены.
Рассчитаем величины M и N для блочной сети изображенной на рис. 5.3, построенной по двум маршрутам, в каждом из которых 4 снимка, с использованием в качестве опорной информации коорди-
наты опорных точек и центров проекции снимков.
2 |
4 |
4 |
2 |
|
2 |
3 |
3 |
2 |
|
2 |
4 |
4 |
2 |
|
2 |
3 |
3 |
2 |
|
4 |
8 |
8 |
4 |
|
4 |
4 |
|||
6 |
6 |
|||
|
|
|||
2 |
4 |
4 |
2 |
|
2 |
3 |
3 |
2 |
|
2 |
4 |
4 |
2 |
|
2 |
3 |
3 |
2 |
|
|
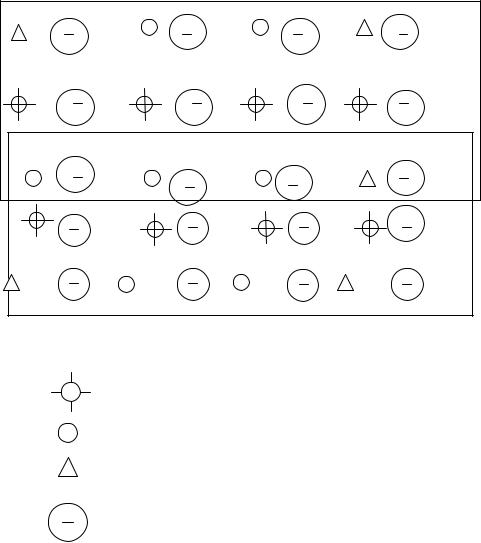
Рис. 5.3. Блок снимков из двух маршрутов |
|||
|
– главная точка снимка, |
|
||
|
– точка сети; |
|
|
|
|
– планово-высотная точка; |
|
||
2 |
– количество точек, измеренных на снимках |
|||
2 |
(в числителе – количество точек, измерен- |
|||
ных на стереокомпараторе или аналитической стереофотограмметрической системе, а в знаменателе – количество точек, измеренных на цифровой фотограмметрической системе).
Для блочной сети, изображенной на рис. 5.3, n = 8, а k = 20, поэтому
N 6 8 3 20 108.
125
Из рис. 5.3 следует, что m = 72, если снимки измерялись на стереокомпараторе или аналитическом стереофотограмметрическом приборе, и m = 60, если снимки измерялись на цифровой фотограмметрической системе, c 5, а S 8. Следовательно,
M 2 72 3 5 3 8 183, если снимки измерялись на стереокомпараторе или аналитической стереофотограмметрической системе, и M 2 60 3 5 3 8 159, если снимки измерялись на цифровой фотограмметрической системе.
5.4. Построение и уравнивание маршрутной и блочной сети фототриангуляции по методу связок с самокалибровкой
При построении и уравнивании сетей маршрутной и блочной фототриангуляции в измеренные на снимках значения координат точек вводятся поправки, позволяющие исключить систематические ошибки снимков, вызываемые дисторсией объектива съемочной камеры, деформацией фотопленки, атмосферной рефракцией.
Однако снимки, тем не менее, имеют остаточные систематические искажения, которые вызваны изменением в полете параметров (элементов внутреннего ориентирования и дисторсии объектива съемочной камеры), из-за отличия температуры и давления от их значений, полученных при проведении калибровки съемочной камеры, а также отличием параметров слоя атмосферы от параметров стандартной атмосферы, влиянием на положение точек на снимке оптического люка и другими причинами.
Систематические искажения снимков можно исключить или в значительной мере ослабить их влияние и, как следствие, повысить точность построения сети фототриангуляции, при ее построении и уравнивании по методу связок с самокалибровкой.
В этом методе построения и уравнивания сети фототриангуляции в отличие от метода изложенного в разделе 3 для каждой точки, измеренной на снимке, составляются уравнения:
x0
y0
в которых
f |
|
x* |
|
x |
|
0 |
|
|
|
|
|
|
* |
x |
|
|
|
||||
|
|
z |
|
|
|
|
, |
(5.17) |
||
|
|
|
|
|
|
|
||||
|
|
y* |
|
|
|
|
|
|||
f |
|
|
y y |
0 |
|
|
|
|||
|
z |
* |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
126

x* |
|
X XS |
||||
|
|
|
|
Y Y |
|
|
y* AT |
|
S |
, |
|||
|
|
|
|
|
||
* |
|
|
|
|
||
z |
|
|
Z ZS |
|
||
а x и y полиномы, описывающие систематические искажения снимков.
Полиномы, описывающие систематические искажения снимков, могут иметь различный вид. В качестве примера приведем один из таких полиномов:
|
|
|
|
|
x k r2 k |
r4 k r6 p y2 |
3x2 2p |
x y |
(5.18) |
||||||||||||||
|
|
|
|
x |
|
1 |
2 |
k |
2 |
|
4 |
3 6 |
1 |
|
2 |
2 |
2 |
, |
|||||
|
|
y |
y k r |
|
2 |
r |
|
k |
r |
2p xy p x |
|
3y |
|
|
|||||||||
|
|
|
|
1 |
|
|
|
|
|
|
3 |
|
1 |
2 |
|
|
|
|
|
||||
где |
|
r |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
x2 y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
вид |
Уравнения поправок соответствующие уравнениям (5.17) имеют |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 XS a2 YS a3 ZS a4 a5 a6 a7 X a8 Y |
|||||||||||||||||||||||
a9 Z a10 k1 a11 k2 a12 k3 a13 p1 a14 p2 lx x |
|
||||||||||||||||||||||
|
|||||||||||||||||||||||
b X |
S |
b Y b Z |
S |
b b b b X b Y |
(5.19) |
||||||||||||||||||
1 |
|
|
2 |
|
|
S |
3 |
|
|
|
|
4 |
|
5 |
6 |
|
7 |
|
8 |
|
|||
b9 Z b10 k1 b11 k2 b12 k3 b13 p1 b14 p2 ly y |
|
||||||||||||||||||||||
|
|||||||||||||||||||||||
Построение и уравнивание сети фототриангуляции производится аналогично построению и уравниванию сети фототриангуляции по методу связок в результате решения по методу наименьших квадратов системы уравнений поправок (5.19) и уравнений поправок, составленных для опорных точек и измеренных значений элементов внешнего ориентирования снимков.
В результате решения определяют значения элементов внешнего ориентирования снимков, координат точек местности и коэффициентов полинома (5.18).
Необходимо заметить, что общее количество неизвестных определяемых при построении и уравнивании сети фототриангуляции в рассматриваемом способе увеличивается на количество коэффициентов полинома (в нашем случае эта величина равна 5).
При построении сети необходимо контролировать степень корреляции коэффициентов полинома, элементов внешнего ориентирования снимков и координат точек местности.
127
В случае большой степени корреляции коэффициентов полинома между собой и другими определяемыми величинами эти коэффициенты необходимо исключить или использовать другой вид полинома.
5.5.Технология построения сетей фототриангуляции
1.Фототриангуляция должна выполняться путем построения блочных или маршрутных фотограмметрических сетей. При многомаршрутной, площадной аэросъемке формируются и уравниваются блочные сети.
1.1.Для построения маршрутных фотограмметрических сетей необходимо, чтобы фактическое продольное перекрытие снимков было порядка 60 %. Для блочных фотограмметрических сетей при таком же продольном перекрытии снимков поперечное перекрытие их должно составлять порядка 30 % или более.
1.2.Если фотограмметрическое сгущение выполняется с целью определения плановых координат и высот точек местности, то для обработки предпочтение следует отдавать снимкам, полученным широкоугольными и сверх широкоугольными съемочными камерами. При фотограмметрическом сгущении планового обоснования могут использоваться снимки, полученные нормальноугольными съемочными фотокамерами.
2.В фотограмметрические сети включают:
а) пункты геодезических сетей и точки съемочного обоснования, а также опорные фотограмметрические точки, определяемые при построении фотограмметрических сетей по каркасным маршрутам;
б) основные фотограмметрические точки (в углах моделей), используемые как опорные или контрольные при последующей обработке отдельных моделей или снимков на процессах составления оригинала и трансформирования снимков;
в) ориентировочные точки, по которым осуществляется внешнее ориентирование снимков и создаются отдельные модели, т.е. элементарные звенья сети;
г) связующие точки, лежащие в зоне тройного перекрытия снимков и служащие для соединения соседних элементарных звеньев при формировании маршрутной сети;
д) общие точки, предназначенные для объединения перекрывающихся маршрутных сетей в блок;
128
е) точки для связи со смежными участками; ж) точки на урезах вод и наиболее характерные* точки местно-
сти, отметки которых должны быть подписаны на карте или плане.
(* При большом числе характерных точек часть из них определяется в процессе стереорисовки рельефа на фотограмметрических приборах);
з) закрепленные на местности точки инженерного назначения, координаты которых должны быть определены при фототриангулировании (при съемках в масштабах 1:5000 – 1:500);
и) дополнительные точки, служащие для придания большей жесткости отдельным элементарным звеньям и сети в целом.
2.1.Точки для взаимного ориентирования снимков размещают группами по 2–3 в шести стандартных зонах стереопары. Радиус стандартной зоны может составлять порядка 0,1 размера базиса фотографирования в масштабе снимка.
2.2.Число связующих точек для соединения моделей в маршрутную сеть должно быть не менее пяти-шести в полосе тройного продольного перекрытия.
2.3.Общие точки для соединения маршрутов в блок размещают равномерно по всей полосе поперечного перекрытия. Количество таких точек зависит от ширины полосы, но в любом случае с каждой стороны стереопары следует намечать не меньше 3 точек при 30 % поперечном перекрытии и не менее 6 точек при 60 % поперечном перекрытии.
2.4.Фотограмметрические точки разного назначения должны по возможности совмещаться. Общее число их на стереопару при стандартных продольном и поперечном перекрытиях должно быть не меньше 30-ти при автоматическом отождествлении идентичных точек снимков и не меньше 20-ти, если стереоскопические измерения снимков выполняет непосредственно исполнитель, работающий на фотограмметрическом приборе.
2.5.При выборе точек следует соблюдать следующие требова-
ния:
- выбранная точка должна изображаться на возможно большем числе смежных снимков;
- соседние точки должны располагаться на снимке на расстоянии друг от друга не менее 0,05 его базиса;
- точки в зонах тройного, четвертного и т. д. перекрытий снимков желательно располагать не на одной прямой;
129