Материал: 2385
В результате перемножения матриц
А А А А А А ,
получим значения элементов aij , как функции углов , и :
а11 |
cos cos |
|
|
a12 |
cos sin |
|
|
|
|
||
a13 |
sin |
|
|
a21 |
sin sin cos cos sin |
|
|
|
|
||
a22 |
|
|
(3.3); |
sin sin sin cos cos |
|||
a23 |
sin cos |
|
|
|
|
||
a31 |
cos sin cos sin sin |
|
|
a32 |
cos sin sin sin cos |
|
|
|
|
||
a33 |
cos cos |
|
|
|
|
||
Если известны значения направляющих косинусов aij, то из выражений (3.3) можно получить значения углов , , .
|
|
a23 |
|
|
|
|
|
|
|
|
|
|||
arctg |
a33 |
|
|
|
|
|
|
|
|
arcsin a |
13 |
|
(3.4). |
|
|
||||
arctg a12
a11
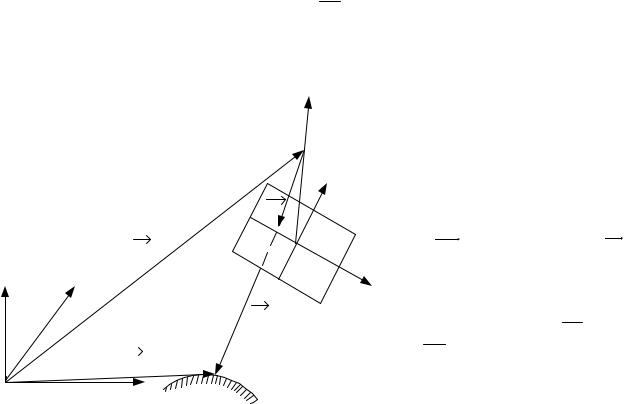
3.Формулы связи координат соответственных точек снимка и местности.
Z Y
z
|
·S |
|
y |
|
r |
Rs |
m· ·o |
|
x |
|
R |
Пусть из точки S получен снимок Р, на котором точка М местности изобразилась в точке m. Найдем зависимости между координатами этих точек. Положение точки М местности в системе координат объекта OXYZ определяет вектор
RM OM . Вектор |
RS OS |
определяет положение центра проекции S в системе
координат объекта OXYZ.
Векторы r Sm и
|
|
|
|
· |
|
|
|
R SM определяют собственно |
O· |
RM |
M |
Рис. 3.2 |
|
||||
|
положение точек m и М |
|||||||
|
X |
|
|
|
относительно центра проекции |
|||
|
Из рис.3.2 |
следует, что |
|
|
|
S. |
||
|
|
|
|
|
||||
|
|
|
|
|
|
RM RS R |
(3.5). |
|
|
|
|
коллинеарные, поэтому можно записать, что |
|||||
|
Векторы R и r |
|||||||
|
|
|
|
|
|
R Nr ; |
(3.6) |
|
47

где N-скалярная величина.
С учетом (3.6) выражение (3.5) имеет вид
|
RM RS Nr ; |
(3.7) |
||||
В координатной форме выражение (3.7) имеет вид |
||||||
X |
X |
S |
|
X |
||
|
|
|
|
|
|
|
Y YS N Y ; |
||||||
|
|
|
|
|
|
|
|
Z |
ZS |
|
|
Z |
|
или
X XS NX
Y YS NY . (3.8)
Z ZS NZ
В выражении (3.8):
X,Y,Z-координаты точки М в системе координат объекта,
Хs,Ys,Zs координаты центра проекции S в системе координат объекта;
X ,Y ,Z координаты вектора r в системе координат объекта.
X |
x x |
0 |
|
|
||
|
|
|
|
|
(3.9) |
|
Y |
A y y0 |
; |
||||
|
|
|
f |
|
|
|
|
Z |
|
|
|
|
|
где А-матрица преобразования координат, элементы aij которой определяются по значениям угловых элементов внешнего ориентирования снимка , , .
Из третьей формулы выражения (3.8) следует, что
N Z ZS .
Z
Подставив значение N в первые две формулы выражения (3.8) получим формулы связи координат соответственных точек местности и снимка:
Х ХS (Z ZS) |
X |
|
|
|||||
|
|
|
|
|
||||
|
|
|
|
|||||
|
|
|
|
Z |
; |
(3.10) |
||
|
|
|
Y |
|
|
|||
Y Y (Z Z |
|
) |
|
|
|
|
||
S |
|
|
|
|||||
S |
|
|
Z |
|
|
|
||
которые с учетом (3.9) имеют вид |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
X |
XS Z ZS |
a11(x x0) a12(y y0) a13 f |
|
|
||||||||
|
|
|
|
|
|
|
||||||
a (x x ) a32(y y |
) a |
33 |
f |
|
|
|||||||
|
31 |
0 |
|
0 |
|
|
|
|
|
|||
|
YS Z ZS |
a21(x x0) a22(y y0) a23 |
f |
|
|
; |
(3.11) |
|||||
Y |
|
|
||||||||||
a31(x x ) a (y y |
0 |
) a f |
|
|
|
|
||||||
|
0 |
32 |
|
33 |
|
|
|
|
|
|||
Из формул (3.10 и 3.11) следует, что координаты точки местности по снимку можно получить по координатам её изображения на снимке, если известны элементы внутреннего и внешнего ориентирования снимков и известна высота Z этой точки.
Найдем теперь формулы связи координат соответственных точек и местности, которые позволят вычислить координаты изображения точки на снимке в системе координат снимка по координатам соответственной точки местности, определенным в системе координат объекта OXYZ.
Из выражения (3.7) следует, что
48

r |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(RM RS). |
(3.12) |
|||||||||||||||||
|
||||||||||||||||||
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В координатной форме выражение (3.12) имеет вид |
|
|||||||||||||||||
x x |
|
|
|
|
|
|
|
1 |
|
|
x |
|
||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
y y0 |
|
|
|
|
|
y |
; |
|
||||||||||
|
|
|
|
|
||||||||||||||
|
f |
|
|
|
|
|
|
|
N |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|||||
или |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
x x0 |
|
|
|
x |
* |
|
|||||||||||
|
|
|
|
|
|
|||||||||||||
|
N |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
|
y y0 |
|
y* |
; |
(3.13) |
|||||||||||||
|
|
|||||||||||||||||
|
|
|
|
|
1 |
|
|
N |
|
|
|
|
|
|||||
|
f |
z |
* |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
N |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В выражении (3.13) x,y –координаты изображения точки местности m в системе координат снимка Sxyz.
x* |
|
X X |
|
|
||
|
|
AT |
|
|
S |
|
y* |
Y YS ; |
(3.14) |
||||
|
* |
|
|
|
|
|
z |
|
|
|
Z ZS |
|
|
Из третьего выражения (3.13) следует, что
1 f . N z*
Подставив значение 1 в первые два уравнения выражения (3.9), получим
N
формулы связи координат соответственных точек снимка и местности.
|
|
* |
|
|
|
|
||
x x0 |
f |
x |
|
|
|
|
||
* |
|
|
||||||
|
|
|
z |
|
|
|
; |
(3.15) |
|
|
|
y* |
|
||||
y y0 |
f |
|
|
|
|
|||
|
z |
* |
|
|
|
|||
|
|
|
|
|
|
|
|
|
которые с учетом (3.14) имеют вид
x x0 f |
a11(X XS ) a21(Y YS ) a31(Z ZS ) |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a (X X |
S |
) a |
23 |
(Y Y ) a |
33 |
(Z Z |
S |
) |
|
|
|
|||||||||
|
13 |
|
|
S |
|
|
|
|
|
|
; |
3.16 |
||||||||
|
a (X X |
|
) a |
|
|
(Y Y ) a |
|
|
(Z Z |
|
|
) |
|
|||||||
|
S |
22 |
32 |
S |
|
|
|
|||||||||||||
y y0 f |
12 |
|
|
S |
|
|
|
|
|
|
|
|||||||||
|
|
) a |
|
(Y Y ) a |
|
(Z Z |
|
) |
|
|
||||||||||
|
a (X X |
S |
23 |
33 |
S |
|
|
|
|
|||||||||||
|
|
13 |
|
|
S |
|
|
|
|
|
|
|
|
|
||||||
Уравнения (3.16) в фотограмметрии часто называют уравнениями коллинеарности.
4.Формулы связи координат соответственных точек местности
и горизонтального снимка.
У горизонтального снимка угловые элементы внешнего ориентирования= = =0. Будем считать, что координаты главной точки снимка x0=y0=0.
В этом случае
49
|
1 |
0 |
0 |
|
|
|
А АТ |
|
|
1 |
0 |
|
3.17 |
Е 0 |
; |
|||||
|
|
0 |
0 |
1 |
|
|
|
|
|
|
|||
Формулы связи координат при этом будут иметь вид
X XS |
|
Z Z |
S |
|
|
x |
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||
|
f |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
; |
3.18 |
||
|
|
|
|
Z ZS |
|
|
|
|
|
|
|||||
Y Y |
|
y |
|
|
|
|
|||||||||
|
|
|
|
|
|||||||||||
|
|
S |
|
f |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x |
|
|
f |
X X |
|
|
|
|
|
||||||
|
|
|
|
|
S |
|
|
||||||||
|
|
Z ZS |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
(3.19) |
||||
|
|
|
f |
Y Y |
|
. |
|
||||||||
y |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|||||||||
|
|
Z ZS |
|
S |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Если в качестве начала системы координат объекта OXYZ выбрать центр проекции S, то Xs=Ys=Zs=0, а формулы (3.18) и (3.19) примут вид:
|
|
|
|
Z |
|
|
|
H |
|
|
|
|
|||||
X |
|
|
|
x |
|
|
|
|
x |
|
|
|
|
||||
f |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
f |
|
; |
|
3.20 |
||||||
|
|
|
Z |
|
|
H |
|
|
|
|
|||||||
Y |
y |
y |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
f |
|
|
|
f |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
x |
f |
X |
f |
X |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
Z |
|
|
|
|
|
H |
|
|
|
3.21 |
|||||
|
|
|
|
|
|
|
|
|
. |
||||||||
y |
|
f |
|
Y |
|
f |
Y |
|
|
|
|||||||
|
Z |
|
H |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
( H = -Z – высота фотографирования над определяемой точкой)
Из формул(3.20) и (3.21) следует, что горизонтальным снимком горизонтальной местности можно пользоваться как планом масштаба
|
1 |
f . |
|
|
|
|
m |
H |
|
|
|
|
|
z0 |
|
x |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
x0 |
P |
|
|
f |
|
f |
|
|
|
r |
|
||
|
|
|
|
|
|
|
|
|
|
o |
|
Р |
0 |
О |
|
m |
|
|
|
r0 |
|
||
|
|
|
|
m0 |
|
|
|
|
|
|
M |
|
|
|
|
|
|
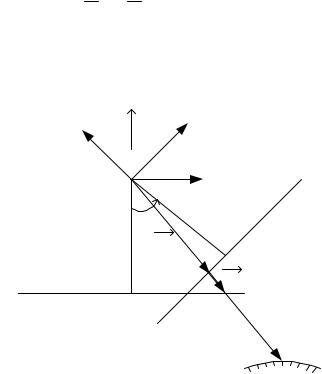
5. Формулы связи координат соответственных точек горизонтального и наклонного снимков
Пусть из точки S получен наклонный Р и горизонтальный Р0 снимки, на которых точка М объекта изобразилась соответственно в точках m и m0 (рис. 3.3). Найдем зависимости между координатами этих точек.
50

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На рис. 7 |
|
|
|
|
и |
Sm0 r0 – векторы, определяющие положение точек m и m0 |
|||||||||
|
|
|
Sm r |
|
|
||||||||||||
|
относительно центра проекции S на снимках Р и Р0. |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
коллинеарные, поэтому можно записать: |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
Векторы r иr0 |
|||||||||||||
|
r0 |
Nr ; |
|
|
|
|
|
|
|
|
|
(3.22) |
|||||
|
где N - скаляр. |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
В системе координат горизонтального снимка Sx0y0z0 выражение (3.22) имеет вид |
||||||||||||||
Рис.3.3 |
(полагая х0=у0=0): |
|
|
|
|
|
|
|
|||||||||
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
x |
|
|
|
|
; |
(3.23) |
||||||||
|
|
|
y0 |
|
N y0 |
||||||||||||
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z0 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где x0y0z0 –координаты вектора r |
в системе координат горизонтального |
|||||||
снимка. |
0 |
|
|
|
|
|
|
|
|
x x0 |
|
|
|||||
x |
|
|
|
|||||
y0 |
|
|
|
|
|
(3.24) |
||
A y y0 |
; |
|||||||
|
0 |
|
|
|
f |
|
|
|
z |
|
|
|
|||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Из третьего уравнения (3.23) следует, что |
|
|||||||
|
|
|
|
|
f |
|
|
|
|
|
|
N |
|
|
. |
|
|
|
|
|
|
|
|
|
||
z0
Подставив значение N в первые два уравнения (3.23) получим формулы связи координат соответственных точек горизонтального и наклонного снимков:
|
|
|
|
x |
0 |
|
|
x0 |
f |
|
|
|
|||
|
0 |
|
|||||
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
y0 |
|
||
y |
0 |
f |
|
|
|
||
|
|
|
|
|
|||
|
|
0 |
|
||||
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
которые с учетом (3.24) имеют вид:
x0 |
f |
a |
11 |
x x |
0 |
a |
12 |
y y |
0 |
a |
13 |
f |
|
|
||
|
|
|
|
|
|
|
|
|||||||||
a31 x x0 a32 y y0 a33f |
||||||||||||||||
|
|
|
|
|
||||||||||||
|
|
a21 x x0 a22 y y0 a23f |
|
. |
||||||||||||
y0 |
f |
|
|
|||||||||||||
|
|
|||||||||||||||
|
|
|
a31 x x0 a32 y y0 a33f |
|
|
|||||||||||
|
|
|
|
|
||||||||||||
(3.25)
(3.26)
6. Масштаб изображения на аэроснимке
S 
 a bo
a bo
Po ao  b
b
Ранее было установлено, что масштаб горизонтального снимка равнинной местности постоянен и определяется отношением фокусного расстояния съемочной камеры к высоте фотографирования. На-
Pклонный снимок содержит перспективные искажения, и его масштаб уже не будет постоянным. В частности, из рис. 3.4 следует, что
A |
B |
для снимка P0: |
1 |
|
f |
|
a0b0 |
; для снимка P: |
|
|
|
||||||
|
|
|
m |
H |
|
AB |
|
|
|
|
|
|
|
||||
Рис. 3.4. Масштаб наклонного и горизонтального
51