Материал: 2385
Изложенный метод используется и для отыскания проекций отдельных точек. При |
||||||||||||
этом проектирующая плоскость проводится через исходную точку предметной плоскости, |
||||||||||||
центр проекции и главную точку схода. Для отыскания искомой проекции нужно провести |
||||||||||||
через исходную точку A |
(рис. 2.5) прямую параллельно проекции главной вертикали до |
|||||||||||
пересечения с основанием картины TT, соединить полученную двойную точку с главной |
||||||||||||
точкой схода i и провести проектирующий луч SA. |
|
|
|
|
|
|
||||||
4. Теорема Шаля. Эпюры |
|
|
|
|
|
|
|
|||||
Найдем проекцию a точки A предметной плоскости (рис. 2.6) и будем вращать |
||||||||||||
картинную |
плоскость |
P |
вокруг |
основания |
картины |
TT |
и одновременно |
плоскость |
||||
действительного горизонта E |
вокруг линии действительного горизонта hihi |
вместе с |
||||||||||
построениями на них, сохраняя взаимную параллельность плоскости действительного го- |
||||||||||||
ризонта и предметной. Вращение прекратим, как только предметная плоскость E, |
кар- |
|||||||||||
|
|
|
h |
|
|
тинная |
P |
и |
плоскость |
действительного |
||
|
E |
|
|
|
горизонта |
E |
сольются |
в одну, |
точка S |
|||
|
|
|
i |
|
||||||||
|
S |
|
|
|
окажется в положении S , точка i – в поло- |
|||||||
|
|
|
|
|
||||||||
h |
|
T |
a |
P |
hi |
жении i , а точка a – в положении a . По |
||||||
E |
P |
vo |
|
|
E |
условию |
Si=S i и il=li . |
|
|
|||
|
|
Докажем, |
что |
проекция |
a точки A |
при |
||||||
S΄ |
i |
|
|
V |
||||||||
a |
|
|
|
|
вращении плоскостей своего положения не |
|||||||
|
|
l |
|
A |
||||||||
|
hi |
|
|
изменила. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||
|
|
T |
|
|
Из подобных треугольников Sai и |
|||||||
|
Рис. 2.6. Теорема Шаля |
|
|
|||||||||
|
lA/Si=la/ia. |
|
Aal следует: |
|
|
|
|
|||||
|
|
(2.2) |
|
|
|
|
|
|||||
Треугольники S a i и a Al также подобны, и можно записать: |
|
|
|
|||||||||
|
|
|
lA/S i =la /i a . |
|
|
|
|
(2.3) |
||||
Так как Si=S i , приравняем левые части выражений (2.2) и (2.3) |
|
|
|
|||||||||
la/ia=la /i a
и составим производную пропорции
ia al |
|
|
|
|
|
|
|
i a |
|
a l |
. |
||
ia |
|
|
|
|
||
|
i a |
|
|
|||
Поскольку ia+al=i a +a l=il, то и ia=i a , т. е. проекция a точки предметной плоскости A при одновременном вращении плоскостей своего положения не изменила. Этим доказана теорема, известная в специальной литературе как теорема Шаля:
Если при одновременном вращении плоскости действительного горизонта вокруг линии действительного горизонта hihi и предметной плоскости вокруг основания картины TT сохраняется их взаимная параллельность, то проектирующий луч SA всегда проходит через ту же пару сопряженных точек предметной (A) и картинной (a) плоскостей.
Результат не изменится при одновременном вращении любой пары плоскостей: E и E , E и P, или P и E , если плоскости E и E останутся параллельными. Это обстоятельство имеет в фотограмметрии исключительно большое значение и лежит в основе всех методов обработки аэроснимков с преобразованными связками проектирующих лучей.
Совмещенное положение всехтрехосновныхплоскостей вместе с построениями на них называется эпюром (от французского «épure» – «улучшенный»). Если эпюр получен путем увеличения угла наклона картинной плоскости до 1800 (как на рис. 2.6), он называется эпюром растяжения (рис. 2.7), а если уменьшением этого угла до 00 – эпюром сложения (рис. 2.8).
42
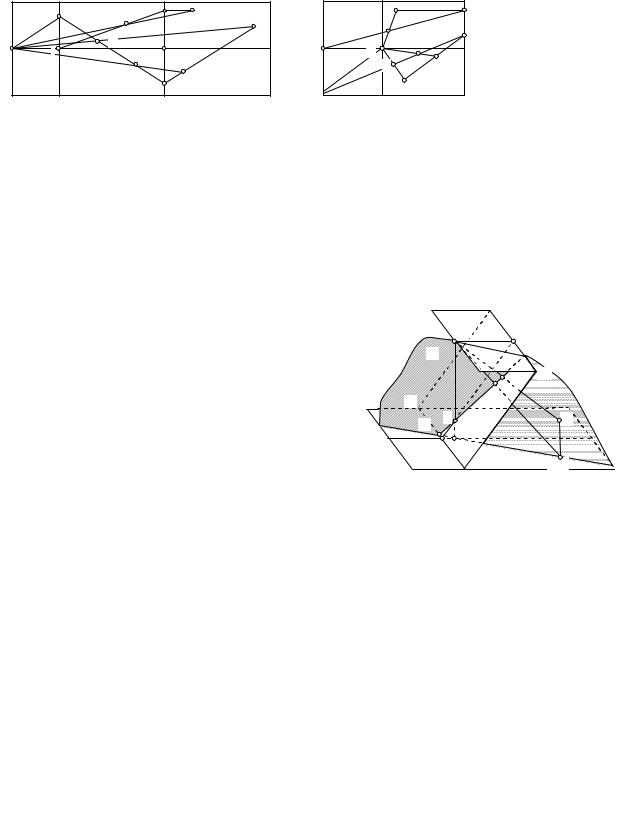
Техника отыскания проекции точек и прямых предметной плоскости на эпюрах |
||||||||||
аналогична |
рассмотренной в § 15 для решения задачи на пространственном чертеже, и |
|||||||||
иллюстрируется рис. 2.7 и 2.8 (точки схода и двойные точки на чертежах не обозначены). |
||||||||||
К недостаткам эпюра растяжения относится наличие острых углов в точках |
||||||||||
пересечения прямых, затрудняющих уверенное отыскание проекций, а эпюра сложения – |
||||||||||
h |
|
|
T |
h |
|
|
T |
большая |
загру- |
|
|
|
|
|
женность |
чертежа |
|||||
|
|
a |
A |
E,P,E´ |
|
A |
|
|||
|
|
|
|
из-за совмещенного |
||||||
|
|
b |
B |
|
|
a |
|
|||
S |
|
|
i |
S |
v0 |
|
положения |
|||
|
v |
|
|
|||||||
|
|
c |
картинной |
и |
||||||
|
|
c |
C |
|
b |
C |
||||
|
|
|
B |
|
предметной |
|||||
E´ |
P |
|
|
|
|
|
||||
|
E |
|
|
|
|
плоскостей. |
||||
h |
|
|
T |
h |
|
|
T |
|||
|
Рис. 2.7. Эпюр растяжения |
Рис. 2.8. Эпюр сложения |
На эпюре сложения, |
|||||||
|
в |
силу |
равенства |
|||||||
|
|
|
|
|
|
|
|
|||
отрезков |
Si |
и ci |
(формулы 2.1), |
центр проекции S совпадает с точкой нулевых |
||||||
искажений c и ее проекцией C. Это означает, что углы с вершиной в проекции точки нуле- |
||||||||||
вых искажений C равны проекциям этих углов в картинной плоскости (с вершиной в точке |
||||||||||
нулевых искажений c). |
|
|
|
|
|
|
|
|||
5. Перспектива отвесной прямой |
|
|
|
|
||
До сих пор рассматривались вопросы построения проекций точек и прямых, |
||||||
расположенных в предметной плоскости. Очевидно, проектируемые объекты могут |
||||||
располагаться и вне предметной плоскости, на- |
|
E΄ |
hi |
|
||
пример, возвышаясь над ней. |
|
|
||||
|
S |
|
i |
|||
Пусть дана отвесная прямая AA0 (точка A0 |
|
|
||||
|
W |
|
||||
|
|
|
||||
лежит в предметной плоскости E), и требуется |
|
|
|
|||
|
|
a |
hi |
|||
построить ее проекцию (рис. 2.9). |
|
|
||||
|
|
a |
|
|||
Для этого воспользуемся изложенным в |
T |
|
|
|||
n |
|
A |
||||
разделе 3 способом и построим проектирующую |
K |
|
||||
плоскость W, проведя ее |
через центр проекции и |
|
N |
|
|
|
|
v |
|
|
|||
отвесную прямую AAo. |
В этой проектирующей |
E |
P |
|
Ao |
|
T |
|
|||||
плоскости размещается также отвесная линия SN, |
|
|
|
|||
Рис. 2.9. Проекция отвесной прямой |
||||||
точка надира n, ее проекция N, искомая проекция |
||||||
|
|
|
|
|||
aa0 и точка схода направления ее перспективы. |
|
|
|
|
||
Поскольку точки Ao и N принадлежат проектирующей и предметной плоскостям, то |
||||||
линией их пересечения будет прямая AoN, пересекающая основание картины в точке K. |
||||||
Очевидно, что линия пересечения картинной и проектирующей плоскостей проходит через |
||||||
точку надира n и точку K основания картины, поскольку обе они принадлежат как кар- |
||||||
тинной, так и проектирующей плоскостям. Теперь для нахождения искомой проекции aao |
||||||
достаточно провести проектирующие лучи в точки A |
и Ao, ограничивающие исходную |
|||||
отвесную линию. Их пересечение с направлением перспективы Kn |
даст точки a, ao и |
|||||
искомую проекцию aa0.. |
|
|
|
|
|
|
Для определения положения точки схода перспектив отвесных линий можно |
||||||
воспользоваться изложенным в разделе 3 правилом и провести проектирующий луч в |
||||||
бесконечно удаленную точку исходной прямой. Этот луч совпадет с отвесной линией SN, |
||||||
пересекающейся с картинной плоскостью в точке надира n. Таким образом, направления |
||||||
перспектив проекций всех отвесных прямых проходят через точку надира, которая |
||||||
является их точкой схода. Это, в частности, означает, что продолжения изображенных на |
||||||
аэроснимке вертикальных объектов (дымовых труб, водонапорных башен, телеграфных |
||||||
столбов, телевизионных мачт и др.) пересекаются в точке надира. |
|
|
||||
43

6. Перспектива сетки квадратов
Для исследования масштаба перспективного изображения построим перспективу сетки квадратов на эпюре растяжения. Стороны сетки выберем так, чтобы одна из них совпадала с основанием картины TT, а другая – с проекцией главной вертикали Vv0 (рис. 2.10). В этом случае точкой схода направлений перспективы прямых, параллельных проекции главной вертикали, будет главная точка схода картинной плоскости i, а направления перспективы линий сетки, параллельных основанию картины, будут также параллельны основанию картины. Для их отыскания построим проекции диагоналей сетки.
Для нахождения направлений перспектив проекций диагоналей сетки соединим точки пересечения диагоналей с основанием картины (точки k1,…, k6) c точками схода их
проекций (i1, i2), полученными в пересечении |
линии действительного |
горизонта |
с |
||||||||||||||||||||||||||
прямыми, проведенных из центра проекции S параллельно диагоналям сетки. |
|
|
|
||||||||||||||||||||||||||
|
|
|
Для отыскания направления перспективы проекций прямых, параллельных |
||||||||||||||||||||||||||
основанию |
|
картины, |
соединим соответствующие точки пересечения |
направлений |
|||||||||||||||||||||||||
|
|
|
|
hi |
|
|
|
|
|
|
|
T |
|
|
|
|
перспектив |
диагоналей |
сетки |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(i1k6, i2k1) |
и |
ее |
сторон, |
|||||||||||
|
|
E |
i |
|
P |
|
|
|
k1 |
|
|
|
|
|
|
параллельных |
|
проекции |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k2 |
|
|
|
|
|
|
главной вертикали (ik1, ik2, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k3 |
|
|
|
|
|
V |
ik3, ivo, …, ik6). |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
vo |
|
|
|
|
|
|
Анализ |
|
полученной |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перспективы позволяет сделать |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k4 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
некоторые |
общие |
выводы |
об |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
i |
|
|
|
|
|
|
|
|
|
k5 |
|
|
|
E |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изменении |
|
|
масштаба |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изображения |
и |
наличии |
||||
|
|
|
|
hi |
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
Рис. 2.10. Перспектива сетки квадратов |
|
|
|
|
перспективных |
искажений, |
в |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
частности: |
|
|
|
|
|
1. При перемещении вдоль главной вертикали от основания картины к главной точке схода картинной плоскости линейные размеры проекций сторон сетки уменьшаются, и в точке i становятся равными нулю. Следовательно, масштаб их изображения изменяется от единицы на основании картины до нуля в главной точке схода.
2. Масштаб изображения по направлениям, совпадающим с горизонталями, остается неизменным. В этом можно убедиться, рассмотрев подобные треугольники с общей вершиной в точке i.
3. Преобразование сетки квадратов предметной плоскости в сетку трапеций в картинной плоскости позволяет говорить о наличии угловых и линейных искажений.
44
Глава 3. ТЕОРИЯ ОДИНОЧНОГО СНИМКА
1.Системы координат снимка. Элементы внутреннего ориентирования снимка.
|
z |
|
z |
|
|
|
На |
каждом |
снимке |
|||
|
|
y |
|
имеются |
|
|
изображения |
|||||
|
|
|
. |
|
|
|
||||||
|
|
|
|
|
координатных |
|
|
меток, |
||||
|
|
|
|
x |
которые определяют правую |
|||||||
|
|
|
S |
|
||||||||
|
|
|
y |
прямоугольную |
|
систему |
||||||
|
|
|
|
|
|
|||||||
|
|
|
f |
|
|
координат снимка o’xyz. |
|
|||||
|
|
|
|
|
|
|
Ось |
х |
этой |
системы |
||
|
|
|
.o |
|
|
проходит |
|
|
|
через |
||
|
|
|
Р |
|
координатные метки 1-2 и |
|||||||
|
r . |
|
|
направлена |
приблизительно |
|||||||
|
x0 |
y0 |
|
x |
по |
направлению |
полета. |
|||||
|
o' |
|
|
|
|
Началом системы координат |
||||||
m |
|
|
|
|
|
является |
|
точка |
|
о’, |
||
. |
|
|
|
|
|
получаемая |
|
в |
результате |
|||
|
|
|
|
|
|
пересечения оси х с линией |
||||||
|
|
|
|
|
|
проведенной |
|
|
через |
|||
|
|
|
|
Рис. 3.1 |
координатные метки 3 и 4. |
|||||||
|
|
|
|
Ось y лежит в плоскости |
||||||||
|
|
|
|
|
|
|||||||
M |
|
|
|
|
|
снимка |
|
|
Р |
и |
||
|
|
|
|
|
перпендикулярна оси х. Ось |
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
z |
дополняет |
|
систему |
до |
||
правой.
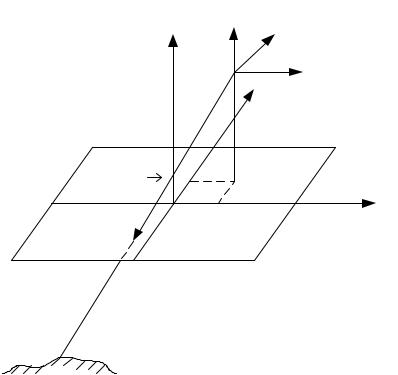
Любая точка снимка, например m, имеет в этой системе координат координаты m(х,у,z =0). Центр проекции S имеет в этой системе координаты S ( x=x0, y=y0, z=f ).
f-фокусное расстояние снимка, а х0 и у0 – координаты главной точки снимка-
О.
Для восстановления связки проектирующих лучей, сформировавших снимок в системе координат снимка o’xyz, необходимо для каждой точки снимка определить координаты вектора Sm r в этой системе координат по измеренным на снимке
координатам точки m.
x |
|
x |
|
x |
|
x |
|
|
x x |
|
|
|
|||
|
m |
|
s |
|
|
|
|
|
0 |
|
|
|
0 |
|
(3.1). |
r ym |
ys |
y |
y |
0 |
|
y y0 |
|
||||||||
|
|
|
|
|
0 |
|
|
f |
|
|
|
f |
|
|
|
zm |
zs |
|
|
|
|
|
|
|
|
|
|||||
Из выражения (3.1) следует , что для восстановления связки проектирующих лучей, необходимо измерить ординаты точки и знать значения координат центра проекции S в системе координат снимка снимка f , х0 , y0, которые являются постоянными для данного снимка и называются элементами внутреннего ориентирования снимка.
Более широко в фотограмметрии используют систему координат снимка Sxyz , началом которой является центр проекции S , а оси координат параллельны соответствующим осям системы координат o’xyz.
Так как система координат Sxyz параллельна системе координат o’xyz ,то, как известно из аналитической геометрии, координаты векторов в обеих системах
45
координат равны, то есть координаты вектора r в системе координат Sxyz
определяется выражением (3.1).
2.Системы координат объекта. Элементы внешнего ориентирования снимка.
Положение точек объекта (местности) по снимкам |
определяют |
в |
прямоугольной пространственной системе координат OXYZ . В зависимости |
от |
|
решаемой задачи в качестве этой системы координат используют: |
|
|
-государственную картографическую систему координат (в России –
-Гаусса – Крюгера);
-геоцентрическую систему координат;
-произвольную систему координат, связанную с характерными точками объекта (местности).
Положение и ориентацию системы координат снимка (или, что то же самое – снимка) в системе координат объекта OXYZ определяют элементы внешнего ориентирования снимка.
Положение центра проекции S в системе координат объекта определяют его координаты Xs,Ys,Zs.
Угловая ориентация системы координат снимка относительно системы координат объекта определяется ортогональной матрицей:
a |
11 |
a |
12 |
a |
13 |
|
cosXx |
|
|
|
|
|
|||
A a21 |
a22 |
a23 |
cosYx |
||||
|
|
a32 |
a33 |
|
|
||
a31 |
|
cosZx |
|||||
cosXy |
cosXz |
|
cosYy |
|
(3.2). |
cosYz |
||
cosZy |
|
|
cosZz |
|
В матрице А элементы (направляющие косинусы) аij являются косинусами пространственных углов между осями координат системы координат объекта OXYZ и снимка Sxyz.
Направляющие косинусы являются координатами единичных векторов (ортов), совпадающих с осями координат снимка в системе координат объекта.
Вследствие особых характеристик ортогональной матрицы:
|
|
А-1=Ат ; |
|
||
|
1 |
0 |
0 |
|
|
а ААт |
|
|
|
|
|
=Е= 0 1 |
0 . |
||||
|
|
0 |
0 |
1 |
|
|
|
|
|||
В ортогональной матрице независимы только 3 элемента, следовательно элементы матрицы являются функцией 3 параметров. В качестве этих параметров в фотограмметрии используют 3 угла - , и , которые называют угловыми элементами внешнего ориентирования снимка.
Последовательно поворачивая систему координат объекта OXYZ на эти углы вокруг ее осей, можно ориентировать ее параллельно осям системы координат снимка. При этом последовательность и направление вращений могут быть произвольными. Поэтому в фотограмметрии используют различные системы угловых элементов ориентирования снимка.
Рассмотрим наиболее широко используемую систему, в которой система координат объекта OXYZ поворачивается последовательно против часовой стрелки (правые углы) вокруг осей X,Yи Z соответственно на углы , и .
46