Материал: 2192
4.2. Пример определения скорости и ускорения точек вращающегося кривошипа
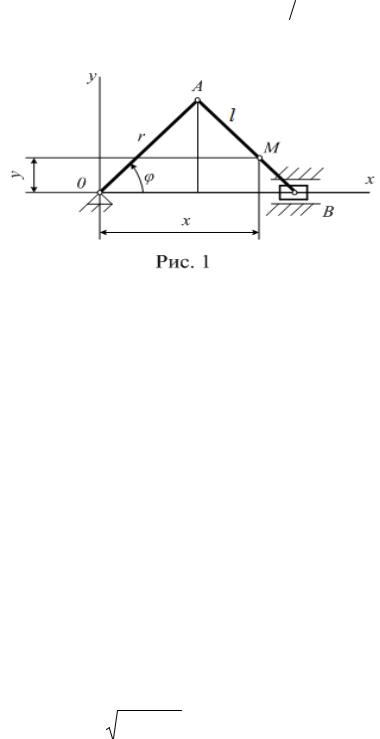
Найти траекторию точки М шатуна кривошипно-ползунного
механизма |
|
(рис. 1), |
|
если |
|
r l 0,6 |
|
м; |
MB l |
3 ; |
|
|
φ 4 t , а также |
|||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
определить скорость, ускорение и радиус кривизны траектории точки М в |
||||||||||||||||||||||||||
момент, когда 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
б |
|
|
|
|
|
|
|
|
|
|||||||||||||||
Решен е. |
|
А |
|
|
|
|||||||||||||||||||||
Определим координаты точки М в функции угла поворота кривошипа |
||||||||||||||||||||||||||
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
5 |
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|||
x l |
|
3 |
l cos |
3 |
l cos |
3 |
0,6cos |
cos ; |
y |
|
|
sin 0,2sin . |
||||||||||||||
|
3 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
||||||||||||
Используя эти уравнения и учитывая, что |
cos2 |
sin 2 1, получим |
||||||||||||||||||||||||
уравнение траектории |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
y2 |
|
1. |
|
|
И |
||||||||
|
|
|
|
|
|
|
|
|
|
12 |
|
0,22 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Траекторией точки M является эллипс с центром в начале координат и |
||||||||||||||||||||||||||
полуосями 1 м (горизонтальная) и 0,2 м (вертикальная). |
|
|
|
|||||||||||||||||||||||
Скорость точки M определим через её проекции на оси: |
||||||||||||||||||||||||||
|
|
d |
cos 4 t |
4 sin 4 t ; |
|
Vy |
|
|
d |
0,2sin 4 t 0,8 cos 4 t . |
||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
Vx x |
dt |
|
y |
|
dt |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При 0 время t 0; Vx 0 ; Vy 0,8 |
м/c. |
|
|
|
|
|
|
|||||||||||||||||||
Скорость точки М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
V |
|
Vx2 Vy2 |
0,8 м/c. |
|
|
|
|
|
|
|||||||||||
Найдём проекции ускорения на оси: |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
ax x 16 |
2 |
cos 4 t ; |
ay y 3,2 |
2 |
sin 4 t . |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
46
При t 0 ax 16 2 ; ay 0 .
Ускорение точки М
a  ax2 a2y 16 2 м/c 2 .
ax2 a2y 16 2 м/c 2 .
Касательное ускорение |
a |
|
Vxax Vy ay |
0 . |
|
|
|
|||||||||
|
|
|
V |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нормальное ускорение |
an |
a2 |
a2 |
16 2 |
м/c 2 . |
|
||||||||||
|
|
|
|
|
|
|
|
V 2 |
|
0,64 2 |
|
|
|
|||
Рад ус кр в зны траектории |
|
|
|
|
|
|
|
|
|
0,04 м. |
||||||
|
|
|
|
16 2 |
||||||||||||
жения |
|
|
|
|
|
an |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
С4.3. Пр мер выполнения расчетно-графической (контрольной) |
||||||||||||||||
работы «Определен е скорости и ускорения точки по заданным |
||||||||||||||||
уравнениям ее движения» |
|
|
|
|||||||||||||
б |
|
|
|
|
|
|
|
|
||||||||
Дано. Уравнен я дв |
|
|
точки М: |
|
|
|
|
|
|
|
|
|||||
|
t |
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
||
|
|
|
|
2 ; |
y 2sin |
t |
|
3 |
, |
|||||||
x 2cos |
|
|
|
|
|
|
|
|||||||||
А |
|
|
||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где х, у – координаты движущейся точки, см.
Определить. Траекторию движения точки М и для момента времени t 1с найти положение точки на траектории, её скорость, полное,
касательное и нормальное ускорения, а также радиус кривизны траектории.
Решение.
Преобразуем параметрические уравнения движения точки:
Д
|
|
|
t |
2 |
|
|
|
x 2 |
|
|
t |
2 |
|
|
y |
3 |
|
|
|
||||
|
cos |
|
|
|
|
|
; |
sin |
|
|
|
; |
|
|
|||||||||
|
3 |
|
|
|
2 |
3 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x 2 |
2 |
|
|
|
y |
3 |
2 |
|
|
|
2 |
|
|
|
2 |
|
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
1; |
x 2 |
(y |
3) |
|
2 |
|
. |
||||||
2 |
|
|
2 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
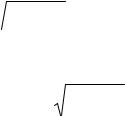
Получено уравнение окружности |
с центром в точке с координатами |
|
x 2 см; y 3 см и радиусом R = 2 |
см. |
И |
После определения траектории имеется возможность изобразить её в декартовой системе координат (рис. 2) и установить положение точки М в
момент времени t 1 с: |
|
|
|
|
|
|
||
|
|
2 |
1 см; |
|
|
3 |
1,262 см. |
|
x 2cos |
|
y 2sin |
3 |
|
||||
3 |
|
|
|
|
|
|
|
|
47
Если положение точки окажется вне траектории, следует прекратить дальнейшие расчёты и найти ошибку в предыдущих расчётах.
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
б |
|
|
|
|
|
|
|
|
||||||||
А |
|
|||||||||||||||
Найдём проекции скорости на оси координат: |
|
|
|
|
|
|||||||||||
|
|
|
t |
2 |
|
2 t |
|
|
4 |
|
|
|
2 |
|
||
|
|
|
|
|
|
|
|
t |
|
|
|
|||||
Vx x 2sin |
|
|
|
Д |
||||||||||||
|
|
|
3 |
|
|
|
3 |
|
|
3 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
2 |
|
2 t |
|
|
4 |
|
|
t |
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|||||||
Vy y 2cos |
3 |
|
|
3 |
3 |
t cos |
3 |
. |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
В момент времени t 1 с Vx 3,628 |
cм/c; Vy 2,094 cм/c. |
|||||||||||||||
Определим модуль скорости: |
|
|
|
|
|
|
|
И |
||||||||
|
V |
|
|
Vx2 Vy2 . |
|
|||||||||||
В момент времени t 1с |
V 4,189 cм/c. |
|||||||||||||||
Покажем на рис. 2 в масштабе составляющие скорости Vx , Vy и
вектор скорости V , который должен быть направлен по касательной к траектории. Если это не произошло, в расчётах допущена ошибка.
Найдём проекции ускорения на оси координат, учитывая, что Vx и
–сложные функции:Vy
48

|
|
|
|
a |
|
V |
|
4 |
|
2 |
|
t2 |
|
t2 |
|
; |
|
|
|
||||||||||||||
|
|
|
|
x |
|
|
|
|
|
t2 cos |
|
|
|
sin |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
3 |
|
3 |
|
|
3 |
|
|
|
|
3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
a |
|
|
V |
|
4 |
|
|
|
2 |
|
t2 |
|
|
t2 |
|
|
|
|
|||||||||||
|
|
|
|
y |
|
|
|
|
|
|
t2 sin |
|
|
|
|
cos |
|
|
. |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
y |
|
|
3 |
|
|
|
3 |
|
3 |
|
|
|
3 |
|
|
|
|
|
|||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
В момент времени t 1 с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
ax 8,014 см/c 2 ; ay |
5,503 см/c 2 . |
|
|
|
|
|
||||||||||||||||||||
|
|
Определ м модуль ускорения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
вогнутости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
ax2 a2y . |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
В момент времени t 1с |
a 9,721 см/c 2 . |
|
|
|
|
|
|
|
a x , |
|
|
||||||||||||||||||||
|
|
Покажем на р с. 2 в масшта е составляющие ускорения |
ay и |
||||||||||||||||||||||||||||||
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
вектор ускорен я |
an , который |
должен |
|
быть |
направлен |
в сторону |
||||||||||||||||||||||||||
|
|
|
|
траектор . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Выч сл м касательное ускорение по формуле : |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
Vx ax Vy ay |
|
|
3,628 |
8,014 |
2,094 |
5,503 |
|
|
|
|
||||||||||||||||||||
|
|
a |
|
V |
|
|
|
|
А |
|
|
|
4,189 см/c 2 . |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4,189 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Положительный знак показывает, что движение точки М ускоренное, |
|||||||||||||||||||||||||||||||
|
то есть направления векторов скорости и касательного ускорения |
||||||||||||||||||||||||||||||||
|
совпадают. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
||||||||||||||
|
|
Определим нормальное ускорение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
an |
a2 a2 |
|
|
9,7212 4,1892 |
8,772 см/c 2 . |
|
|
|
|||||||||||||||||||||
|
|
Покажем на рисунке векторы a и an . |
|
|
И |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V 2 |
4,1892 |
|
|
|
||||
|
|
Определим радиус кривизны траектории: an |
|
8,772 2 см. |
|
|
|||||||||||||||||||||||||||
|
|
Для окружности радиус |
|
кривизны траектории совпадает с радиусом |
|||||||||||||||||||||||||||||
|
окружности: R 2 см. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Результаты расчётов сведём в таблицу 4.1. |
|
|
|
|
|
|
Таблица 4.1 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Таблица результатов расчета |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
x, |
y, |
Vx, |
|
|
|
Vy, |
|
|
|
|
V, |
|
|
|
ax, |
|
|
|
ay, |
a, |
|
|
|
a , |
an , |
, |
|
|||||
|
см |
см |
см/c |
|
|
см/c |
|
|
|
см/c |
|
|
см/c2 |
|
|
см/c2 |
см/c2 |
см/c2 |
см/c2 |
см |
|
||||||||||||
|
–1 |
1,262 |
–3,628 |
–2,094 |
|
|
4,189 |
|
–8,014 |
|
5,503 |
9,721 |
|
|
4,189 |
8,772 |
2 |
|
|||||||||||||||
49
4.4. Варианты расчетно-графической (контрольной) работы «Определение скорости и ускорения точки по заданным уравнениям ее движения»
По заданным уравнениям движения точки М (табл. 4.2) установить вид её траектории и для момента времени t1 найти положение точки на траектории, её скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
|
|
|
|
|
|
|
Таблица 4.2 |
||
|
Номер |
Уравнения движения |
|
t1, c |
|
||||
|
варианта |
|
|
|
|
|
|
|
|
|
X = X(t), см |
|
|
Y = Y(t), см |
|
||||
|
|
|
|
|
|
||||
|
и2 |
|
|
2 |
|
|
|
|
|
|
1 |
– 2·t2 + 3 |
|
|
|
– 5·t |
|
0,5 |
|
С |
|
|
|
|
|
|
|||
|
2 4·cos2·( ·t/3) + 2 |
|
|
4·sin2·( ·t/3) |
|
1 |
|
||
|
3 |
– cos( ·t2/3) + 3 |
|
|
sin( ·t2/3) – 1 |
|
1 |
|
|
|
4 |
4·t + 4 |
|
|
– 4·(t + 1) |
|
2 |
|
|
|
|
б |
|
|
|
|
|
|
|
|
5 |
2·sin( ·t/3) |
|
– 3·cos( ·t/3) + 4 |
|
1 |
|
||
|
6 |
3·t2 + 2 |
|
|
|
– 4·t |
|
0,5 |
|
|
7 |
3·t – t + 1 |
|
|
5·t – 5·t/3 – 2 |
|
1 |
|
|
|
8 |
7·sin( ·t2/6) + 3 |
|
|
2 – 7·cos( ·t2/6) |
|
1 |
|
|
|
|
А |
|
|
|
||||
|
9 |
– 3/(t + 2) |
|
|
|
3·t + 6 |
|
2 |
|
|
10 |
– 4·cos( ·t/3) |
|
|
– 2·sin( ·t/3) – 3 |
|
1 |
|
|
|
11 |
– 4·t2 + 1 |
|
|
|
– 3·t |
|
0,5 |
|
|
12 |
5·sin2·( ·t/6) |
|
– 5·cos2·( ·t/6) – 3 |
|
1 |
|
||
|
13 |
5·cos( ·t2/3) |
|
|
– 5·sin( ·t2/3) |
|
1 |
|
|
|
|
|
Д |
|
|
||||
|
14 |
– 2·t – 2 |
|
|
– 2/(t + 1) |
|
2 |
|
|
|
15 |
4·cos( ·t/3) |
|
|
– 3·sin( ·t/3) |
|
1 |
|
|
|
16 |
3·t |
|
|
4·t2 + 1 |
|
0,5 |
|
|
|
17 |
7·sin2·( ·t/6) – 5 |
|
|
– 7·cos2·( ·t/6) |
|
1 |
|
|
|
18 |
1 + 3·cos( ·t2/3) |
|
|
3·sin( ·t2/3) + 3 |
|
1 |
|
|
|
|
|
|
|
|
И |
|
||
|
19 |
– 5t2 – 4 |
|
|
|
3t |
|
1 |
|
|
20 |
2 – 3·t – 6·t2 |
|
|
3 – 3·t/2 – 3·t2 |
|
0 |
|
|
|
21 |
6·sin( ·t2/6) – 2 |
|
|
6·cos( ·t2/6) + 3 |
|
1 |
|
|
|
22 |
7·t2 – 3 |
|
|
|
5·t |
0,25 |
|
|
|
23 |
3 – 3·t2 + t |
|
|
4 – 5·t2 + 5·t/3 |
|
1 |
|
|
|
24 |
– 4·cos( ·t/3) – 1 |
|
|
– 4·sin( ·t/3) |
|
1 |
|
|
|
25 |
– 6·t |
|
|
– 2·t2 – 4 |
|
1 |
|
|
|
26 |
8·cos2·( ·t/6) + 2 |
|
– 8·sin2·( ·t/6) – 7 |
|
1 |
|
||
|
27 |
– 3 – 9·sin( ·t2/6) |
|
– 9·cos( ·t2/6) + 5 |
|
1 |
|
||
|
28 |
– 4·t2 + 1 |
|
|
|
– 3·t |
|
1 |
|
|
29 |
5·t2 + 5·t/3 – 3 |
|
|
3·t2 + t + 3 |
|
1 |
|
|
|
30 |
2·cos( ·t2/3) – 2 |
|
– 2·sin( ·t2/3) + 3 |
|
1 |
|
||
50