Материал: 2192
Найдём 2 как функцию времени: |
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
V |
B |
|
9t |
0,3t2 . |
|
|
(а) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Так как колёса 2 и 3 связаны ремённой передачей (ремень |
||||||||||||||||||||||||||||
нерастяжим), то VE VM , но VE 2 |
R2 ; |
|
|
VM 3R3 . |
|
|
||||||||||||||||||||||
поэтому |
|
|
|
|
|
|
|
|
|
2 R2 |
3R3 , |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0,3t 2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
50 |
0,25t |
2 . |
|
(б) |
||||||||||
|
|
|
|
|
|
|
|
|
2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
3 |
|
R3 |
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
0,5t . |
|
|
|
|||||
При 0,6t |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
t1=1 c |
з |
(а) (б) найдём |
|
2 |
|
0,3 |
рад/c; |
3 0,25 рад/c. |
|
||||||||||||||||||
С2. Определ м V4 . Так как |
|
|
V4 VD 3r3 , то |
при t1 1c |
имеем |
|||||||||||||||||||||||
V4 10 |
см/с . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
б |
|
|
|
|
|
|
|
||||||||||||||||||
3. |
Найдём |
2 , |
3 . Продифференцируем по времени выражения (а), |
|||||||||||||||||||||||||
(б): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При t |
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
3 |
|
|
|
|
|
|
1 с |
2 |
0,6 рад/c 2 ; |
|
3 |
|
0,5 рад/c 2 . |
|
|
|
||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
4. Найдём |
а4. Рейка |
4 движется поступательно, поэтому все её точки |
||||||||||||||||||||||||||
имеют одинаковые ускорения. Точка D одновременно принадлежит рейке |
||||||||||||||||||||||||||||
4 и ободу колеса 3 радиуса r3 , |
поэтому a |
4 |
a |
r ; |
при t1=1 c |
а4=20 |
||||||||||||||||||||||
см/с2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
3 3 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aA aA aAn |
|
|
5. Найдём ускорение точки |
, используя формулу |
, |
||||||||||||||||||||||||||
где a |
|
2 |
R |
2 |
; |
an |
2 R . |
|
|
|
|
Д |
|
|||||||||||||||
A |
|
|
|
A |
А2 2 |
|
|
|||||||||||||||||||||
При t1=1 c |
|
aA 30 |
|
c м /c2 ; aAn 4,5 |
|
см/с2 ; |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
aA |
|
(a |
)2 |
(an )2 |
30,34 см/с2 . |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
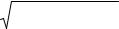
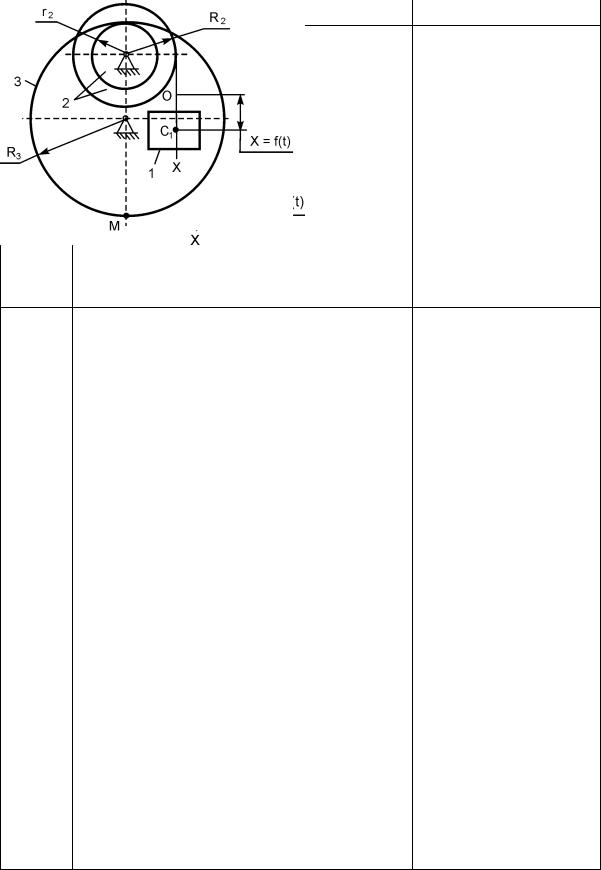
5.2. Пример выполнения расчетно-графическойИ(контрольной)
работы «Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях»
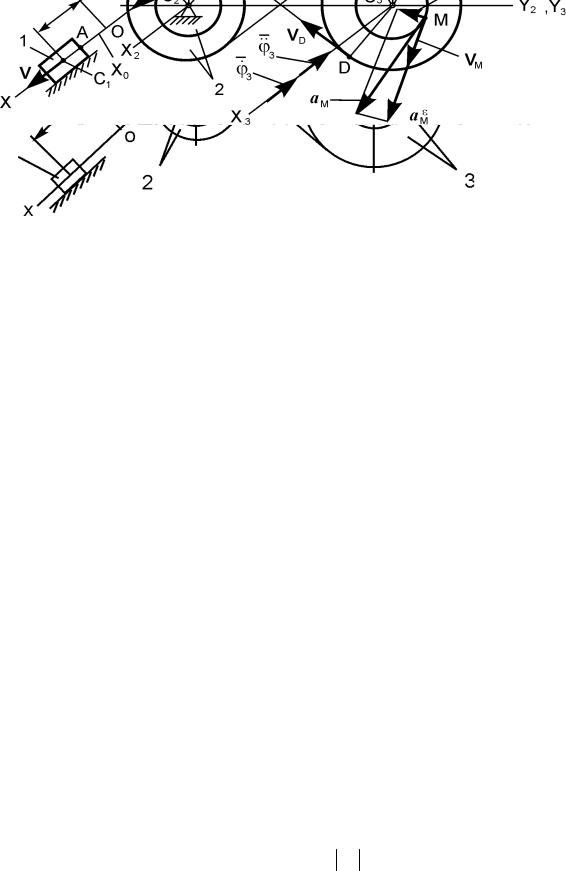
Дано: схема плоского механизма (рис. 4); уравнение движения груза 1:
Х = 2·t2 + 2, см; радиусы колес: R2 = 50 см; r2 = 30 см; R3 = 60 см; r3 = 40
см.
Определить: кинематические характеристики точки М тела 3 в момент
времени t1 = 1 c (VM(t1) = ?; aМn (t1) = ?; aМ (t1) = ? aМ (t1) = ?).
Решение. В начальный момент времени при t0 = 0 координата X(t0) = 2·(t0)2 + 2 = 2·02 + 2 = 2 см.
56
С |
|
течениемвремениувел ч вается. |
Рис. 4 |
Д фференц рован ем по времени уравнения движения груза 1
найдем проекц ю ХС1 скорости его центра масс на ось ОХ: |
||||||||
|
б |
|
|
|||||
|
|
ХС1 |
= |
Х |
= dX/dt |
= d(2t2 + 2)/dt = 4·t. |
||
Так как Х |
= 4·t > 0, то |
Х |
= V и, следовательно, координата Х = f(t) с |
|||||
Для граф ческого |
построения |
определяемых |
кинематических |
|||||
характеристик |
А |
момент времени t |
||||||
изо разим |
механизм в |
произвольный |
||||||
(рис. 5). |
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|||
|
|
|
|
|
Рис. 5 |
И |
||
|
|
|
|
|
|
|
||
Так как груз 1 и участок АВ нити совершают поступательные движения, то справедливо равенство VB = V.
Точка В принадлежит телу 2, совершающему вращательное движение в системе отсчёта C2X2Y2Z2, поэтому модуль скорости этой точки определится из формулы
VB = ω2·BC2 = ω2·r2 = 2 ·r2,
где ω2 – модуль угловой скорости 2 тела 2.
57
Согласно рис. 5 вращение тела 2 происходит против хода часовой стрелки. Определим модуль ω2 угловой скорости 2 тела 2 по формуле
ω2 = VB/r2 = V/r2.
По известному модулю ω2 угловой скорости тела 2 определяется
модуль VC скорости точки С тела 2: |
|
|
|
С |
|
|
|
VC = ω2·CC2 = ω2·R2 |
= (V/r2)·R2 |
= V·(R2/r2). |
|
Так как участок нити CD совершает поступательное движение, то |
|||
справедливо равенство |
VC = VD = V·(R2/r2). |
|
|
другой стороны, точка D принадлежит колесу 3. Исходя из условия |
||||||
скорости |
|
|
||||
принадлежности этой точки телу 3, имеем |
||||||
|
|
|
VD = ω3·R3 = V·(R2/r2), |
|||
где ω3 – модуль угловой |
|
3 тела 3. |
||||
|
|
|
|
|
|
|
Тело 3 осуществляет вращение в направлении хода часовой стрелки с |
||||||
|
б |
|||||
угловая скоростью, выч сляемой по формуле |
||||||
|
|
|
3 = |
|
|
|
|
|
|
Х ·(R2/(r2·R3)) = (4·t)·(R2/(r2·R3)). |
|||
По |
звестной |
|
|
|
3 тела 3, находят его угловое |
|
угловой скорости |
||||||
ускорен |
е 3 |
|
|
|
|
|
: 3 = d 3 /dt = 4·(R2/(r2·R3)) = const > 0. |
||||||
|
|
|
|
|
|
|
Так как |
3 > |
А |
||||
0 и 3 |
= const > 0, то происходит равноускоренное |
|||||
|
|
|
|
|
|
|
вращение тела 3.
Определяем кинематические характеристики точки М тела 3 в момент
времени (t1). Модуль угловой скорости равен |
|
|
|
|
|
|
|
||||||||||
|
|
ω3 |
= 3 = (4·t1)·(R2/(r2·R3)). |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль углового ускорения |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
ε3 |
= 3 = 4·(R2/(r2·R3)). |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль скорости точки М равна |
|
|
|
|
|
|
|
|
||||||||
|
|
VM = ω3·MC3 = ω3·r3 = (4·t1)·(R2·r3/(r2·R3)). |
|
|
|||||||||||||
|
Модуль центростремительного ускорения точки М |
|
|
|
|
||||||||||||
|
|
n |
2 |
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
aМ = ω3 |
·MC3 = ωД3 ·r3 = (4·t1·(R2/(r2·R3))) ·r3. |
||||||||||||||
|
Модуль вращательного ускорения равен |
|
|
|
|
|
|
|
|||||||||
|
|
|
aМ |
= ε3·r3 = 4·(R2·r3/(r2·R3)). |
|
|
|
|
|||||||||
|
Модуль полного ускорения точки М: |
a |
М |
|
(an )2 |
(a |
)2 . |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
М |
М |
|
|
||
|
Произведём вычисления для момента времениИt1 = 1 c и полученные |
||||||||||||||||
значения сведём в таблицу. |
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5.1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ω3(t1), |
ε3(t1), |
|
|
|
|
VM(t1), |
|
aМn (t1), |
aМ (t1), |
|
aМ (t1), |
|
||||
|
рад/с |
рад/с2 |
|
|
|
|
см/с |
|
см/с2 |
|
см/с2 |
|
см/с2 |
|
|||
|
1,111 |
1,111 |
|
|
|
|
44,444 |
|
49,382 |
44,444 |
|
66,434 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
58
5.3. Варианты расчетно-графической (контрольной) работы «Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях»
По условию этого задания требуется определить скорость и ускорение
|
точки М одного из колёс механизма в момент времени t1 |
|
|
|
||||||
|
|
|
(VM(t1) = ?; an |
(t1) = ?; a |
(t1) = ? a (t1) = ?). |
|||||
|
|
|
М |
М |
|
М |
|
|
|
|
|
|
хемы механ змов показаны на рисунках, а необходимые данные |
||||||||
|
приведены в табл. 5.2. |
|
|
|
|
|
Таблица 5.2 |
|||
|
вариан |
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
С |
|
|
|
|
|
|
|
|||
|
Номер |
Расчётная схема механизма |
|
Исходные данные |
|
|||||
|
|
|
|
|
||||||
|
та |
|
|
для расчёта |
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
б |
|
|
|
|
|
||
|
1 |
|
|
2 |
|
|
|
|
3 |
|
|
|
|
А |
Х = 15·t2·+ 12·t + 2, см; |
|
|||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
R2 = 60 см; |
|
|
|
1 |
|
|
|
|
|
|
r2 = 45 см; |
|
|
|
|
|
|
|
|
|
R3 = 36 см; |
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
t1 = 2 c |
|
|
|
|
|
Д2 |
|
|||||
|
|
|
|
|
|
И |
|
|||
|
|
|
|
|
|
|
Х = 4·t |
·+ 10·t + 5, см; |
|
|
|
|
|
|
|
|
|
|
R2 = 80 см; |
|
|
|
|
|
|
|
|
|
|
R3 = 60 см; |
|
|
|
2 |
|
|
|
|
|
|
r3 = 45 см; |
|
|
|
|
|
|
|
|
|
|
|
t1 = 1 c |
|
|
|
|
|
|
|
|
|
|
|
|
59
|
|
Продолжение табл. 5.2 |
|
|
|
|
|
1 |
2 |
3 |
|
С |
|
Х = 0,5 t2 + 6·t + 8, см; |
||||
|
|
|
|
|||
|
|
|
|
|
R2 = 100 см; |
|
3 |
|
|
|
r2 = 60 см; |
||
|
|
|
R3 = 75 см; |
|||
|
и |
|
||||
|
|
t1 = 2 c |
||||
|
|
|
|
|
||
|
|
б |
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
Х = 9,5·t2·+ 4·t + 4, см; |
||
|
|
|
|
|
R2 = 58 см; |
|
4 |
|
|
|
r2 = 45 см; |
||
|
|
|
R3 = 40 см; |
|||
|
|
|
Д |
|||
|
|
|
|
|
t1 = 3 c |
|
|
|
|
|
Х = 6·t2 + 15·t + 3, см; |
||
|
|
|
|
|
R2 = 45 см; |
|
5 |
|
|
Иr2 = 30 см; |
|||
|
|
|
|
|
R3 = 80 см; |
|
|
|
|
|
|
t1 = 2 c |
|
60