Материал: 1798
|
|
|
21 |
|
Из сказанного выше |
можно |
|
||
сделать вывод: пара сил может |
|
|||
только вращать тело, не передвигая |
|
|||
его в сторону ( на рис. 1.20 тело |
|
|||
вращается по часовой стрелке). |
|
|||
Кратчайшее |
расстояние |
|
||
между линиями действия пары сил |
|
|||
называют плечом пары. |
|
|
|
|
Формула |
(1.17) |
показывает, |
|
|
что вращательное действие пары сил |
|
|||
зависит как от величины силы F, так |
|
|||
и от расстояния между ними а. |
|
|||
Момент |
пары |
условимся |
|
|
считать положительным, если он |
|
|||
стремится повернуть |
тело против |
|
||
часовой стрелки и отрицательным, |
Рис.1.20 |
|||
если - по часовой стрелке. |
|
|
||
Пусть |
рычаг |
AB |
может |
|
вращаться вокруг точки A (рис. 1.21, а). |
|
|||
Что будет происходить с рычагом, если |
|
|||
к нему приложить силу F в точке B? |
|
|||
На основании третьей аксиомы, |
|
|||
не нарушая механического равновесия |
|
|||
твердого тела, приложим к нему две |
|
|||
уравновешенные силы F в точке А, |
|
|||
которые параллельны заданной силе F |
|
|||
(рис. 1.21, б). |
|
|
|
|
В результате мы получим пару |
|
|||
сил F (силы перечеркнуты двумя |
|
|||
черточками), у которых момент равен |
|
|||
M = F (AB) = F a , |
|
|||
и силу F, перенесенную параллельно |
Рис.1.21 |
|||
самой себе из точки B в точку A. |
|
|||
В механике пользуются понятием момент силы относительно
точки.
Момент силы относительно точки определяется произведением модуля силы на длину перпендикуляра, опущенного из точки на линию действия силы.
Точка А (рис. 1.21), относительно которой берется момент, называется центром момента, а длина перпендикуляра a- плечом силы относительно центра момента.
22
Момент силы F относительно центра А обозначается
MA(F) = F a. |
(1.18) |
Момент силы измеряют в ньютонометрах (Н м).
Знак момента такой же, как у пары сил, т. е. плюс, если против часовой стрелки и, минус, если по часовой стрелке.
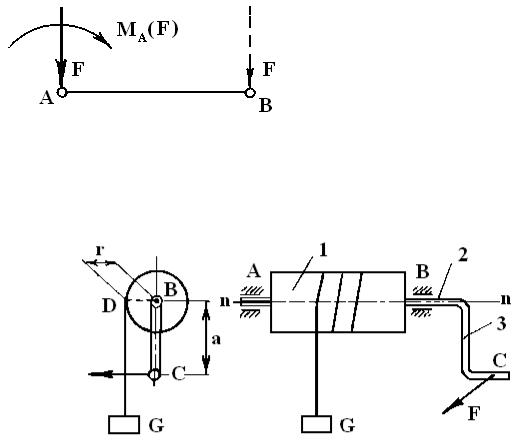
Таким образом, на основании выше изложенного можно сформулировать правило переноса силы в другую точку (рис. 1.22):
Чтобы перенести силу F из точки B в точку А, нужно приложить в точке А силу F, не меняя направления и модуля, и момент силы F
относительно точки А, MA (F).
Такой перенос силы называется приведением силы к другой точке. Этим правилом широко пользуются в статике.
Рис.1.23
Когда линия действия силы проходит через центр (точку А), ее момент относительно этой точки равен нулю, так как в данном случае плечо a = 0.
Колодезный ворот (рис. 1.23) состоит из барабана 1, оси 2, установленной в опорах A и B, и рукоятки 3. При подъеме груза G момент, создаваемый грузом G, равен моменту, создаваемому силой F, приложенной к рукоятке.
При равномерном движении барабан является рассматриваемым нами телом, и при его остановке, согласно аксиоме 1, он должен находиться в равновесии. Поскольку в данном случае движение вращательное, его силовым фактором является момент. Вращение происходит вокруг оси n-n (правая проекция рис. 1.23), которая на левой проекции проектируется в точку B. Рассмотрим равновесие барабана на
23
левой проекции. Центром вращения и центром моментов служит точка B. Момент, создаваемый грузом G относительно точки B,
MB (G) = G r |
(1.19) |
имеет положительный знак (плюс). Момент, создаваемый силой руки F, приложенной к рукоятке в точке С, относительно точки B
MB (F) = F · a |
(1.20) |
имеет отрицательный знак (минус). Сумма моментов относительно точки В
MB MB(G) MB(F) G r F a 0 |
(1.21) |
равна нулю, т.к. система находится в равновесии.
Уравнение (1.21) является третьим уравнением равновесия плоской системы, когда силы приложены к телу произвольно.
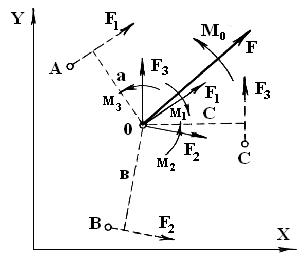
Часто бывает необходимо привести несколько сил к одной точке. Пусть даны силы F1; F2 и F3, приложенные в точках A, B и C. Требуется перенести эти силы в точку О.
Пользуясь правилом (рис. 1.22), переносим силу F1 из точки A в точку O и прикладываем момент
M1 = F1 a .
Затем переносим из точки B в точку O силу F2 и прикладываем момент
M2 = F2 b .
И, наконец, переносим силу
F3 из точки С в точку О и прикла- Рис.1.24 дываем момент
M3 = F3 c .
Силы F1, F2 и F3 приложены к одной точке O, поэтому их можно сложить графическим методом. Сложив геометрически силы, получим равнодействующую F, называемую главным вектором:
n |
|
F= Fi . |
(1.22) |
i 1 |
|
Складывая алгебраически моменты составляющих сил относительно центра O, получим главный момент

24
n |
|
M0 Mi . |
(1.23) |
i 1 |
|
Плоская система сил в результате приведения к данной точке O заменяется главным вектором и главным моментом.
Поскольку плоская система сил приводится к главному вектору и главному моменту, для обеспечения равновесия системы необходимо, чтобы главный вектор и главный момент равнялись нулю:
n |
n |
|
F Fi 0 ; |
M0 Mi 0 . |
(1.24) |
i 1 |
i 1 |
|
Эти уравнения называются векторными уравнениями равновесия.
Рассмотрим данную выше систему сил F1, F2 и F3 в координатных осях XOY (рис. 1.24).
Равнодействующая проекций сил на ось X определяется по формуле
|
|
n |
|
|
|
|
|
|
Fx Fxi . |
|
(1.25) |
||||
|
|
i 1 |
|
|
|
|
|
Равнодействующая проекций сил на ось Y определится по формуле |
|||||||
|
|
|
n |
|
|
|
|
|
Fy |
Fyi . |
|
(1.26) |
|||
|
|
i 1 |
|
|
|
|
|
Величина главного вектора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.27) |
|
F |
2 |
2 |
|
|
||
|
|
Fx |
Fy . |
|
|
||
Для обеспечения равновесия системы необходимо: |
|
||||||
n |
n |
|
|
|
|
n |
|
Fx xxi 0; Fy |
yyi 0; M0 |
Mi 0. |
(1.28) |
||||
i 1 |
i 1 |
|
|
|
|
i 1 |
|
Уравнения (1.28) называются уравнениями равновесия плоской системы, выраженные в аналитической форме. В дальнейшем для упрощения записей будем писать:
1. Сумма проекций на ось X равна нулю:
X 0. |
(1.29) |
2. Сумма проекций на ось Y равна нулю:
Y 0. |
(1.30) |
25
3. Сумма моментов относительно точки А равна нулю:
M A 0. |
(1.31) |
Уравнения (1.29 - 1.31) в дальнейшем будем называть уравнениями равновесия плоской системы сил.
.5. Составление уравнений равновесия
Встречается много задач, в которых тело представляет собой балку, установленную по концам на две опоры. В §1.3.5 приведен порядок решения задач, воспользуемся им.
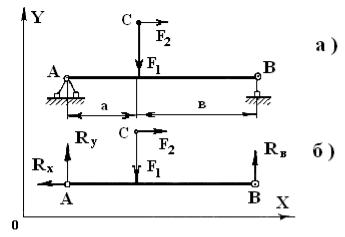
Пусть на балку AB (рис. 1.25, a), которая опирается на опоры A и B, действуют силы F1 и F2, приложенные в точке C жестко связанной с балкой AB. Все три точки AB и С принадлежат одному телу. Требуется определить реакции опор A и B.
Рис.1.25
Ре ш е н и е
1.Выделяем тело (балку ABC) и прикладываем к ней известные
силы F1 и F2 (рис. 1.25, б).
2.Освобождаем тело от связей и заменяем их действие реакциями. В точке А на балку (см. рис. 1.11) действуют две реакции Rx и Ry. Опора B может воспринимать только силу, которая действует вертикально, т.е. вдоль оси Y, а сила вдоль оси X может свободно, без сопротивления двигать точку В влево и вправо. Поэтому в точке В на балку действует реакция RB (рис. 1.25, б).
3.Выбираем координатную систему XOY и составляем три уравнения равновесия:
X F2 Rx 0;
Y Ry RB F1 0;
MA F1 h RB a b 0.